
| This case study describes the design and construction of a soft prosthetic hand for amputees designed by a group of students in the Global Immersion Summer Program in India. | 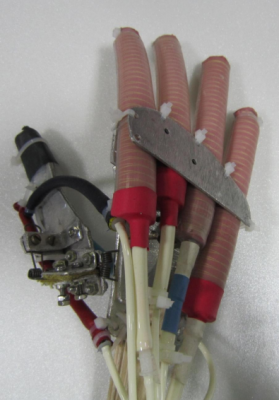 |
Clinical Need
Diabetes, peripheral artery disease and trauma cause hundreds of thousands of upper limb amputations worldwide per year. For amputees, restoring the utility of a missing hand is a major factor in being able to do activities of daily living (ADLs) like eating, bathing and dressing themselves. Gaining the ability to do these basic tasks is extremely helpful to the patient achieving a higher quality of life. Current prosthetics including body powered and myoeletric devices give a lot of this function back to the patient, but can be tiring to use, expensive, stiff, or have a limited range of motion.
Solution
The team’s solution consists of 4 fiber reinforced bending actuators that mimics the index, middle, ring and little fingers. The thumb is an aluminum mechanism actuated by pneumatic artificial muscles.
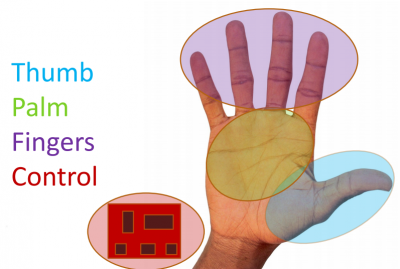
The overall goals of the project were to design a soft prosthetic hand that was: cost effective, aesthetic, provided sufficient grip strength for ADLs, low maintenance, and light weight. The design of the hand was broken up into 4 separate modules: Thumb, Palm, Fingers, and Control. These 4 modules were determined to need to come together to into a few potential grip patterns that would be useful to complete ADLs, including pinching, open palm, pointing and a power grip.
The thumb design needed to be rigid and able to transmit forces in multiple different orientations for the different grip patterns. To achieve these grip patterns, the thumb was designed as a hinged aluminum mechanism. For more information on the thumb's design and actuation visit the case study page under the Pneumatic Artificial Muscles section.
The four fingers consisted of fiber reinforced actuators fabricated exactly as laid out in this section. The four fingers were attached to a palm, which was a passive hinged mechanism. The students experimented with materials such as wood and acrylic before deciding on aluminum for the palm.
 |
 |
The fiber reinforced actuators were controlled by a version of the Open Source Control Board described on this site.
The following video shows the hand in action: