Motivation for Soft Sensors
|
For wearable applications, sensors are needed that are comfortable, conform to the body, and do not alter or restrict the natural movement of the wearer. In addition, the sensors must be able to function at the high strains caused by the natural movement of the body, especially at the joints. Soft sensors are able to meet all of these requirements, as they are highly compliant, lightweight, stretchable, and impact-resistant. Beyond wearable applications, sensors capable of interfacing with soft actuators are necessary for the further development of soft robotics as a field, to enable more robust control of soft robotic devices. |
A glove embedded with soft sensors |

Sensor Components
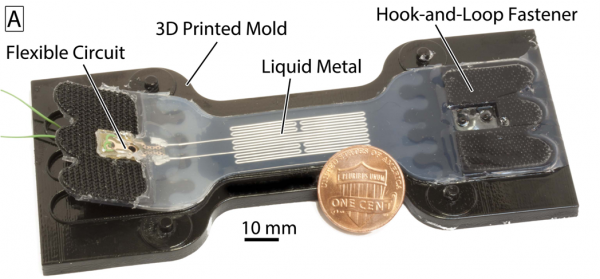
The main functional component of the sensor is a thin structure made of soft, hyperelastic silicone elastomer containing microchannels which are filled with liquid metal alloy. When the sensor is stretched, the elastomer deforms and the geometry of these microchannels is altered. This results in a change in the resistance of the circuit which can be measured. For a more detailed explanation of the sensing principle, read the Modeling section.
A hook-and-loop fastener (Velcro) is used to attach the sensor to structures that are going to be measured. A section of stiffer elastomer acts as an intermediate between the soft silicone rubber that makes up most of the sensor and the much stiffer fastener material. Two copper wires are inserted into the liquid metal for measuring the properties of the liquid metal “wire”. The version shown in the image below has a flexible circuit for this purpose, but that component is not included in the version described here as it required equipment not available to the average user.
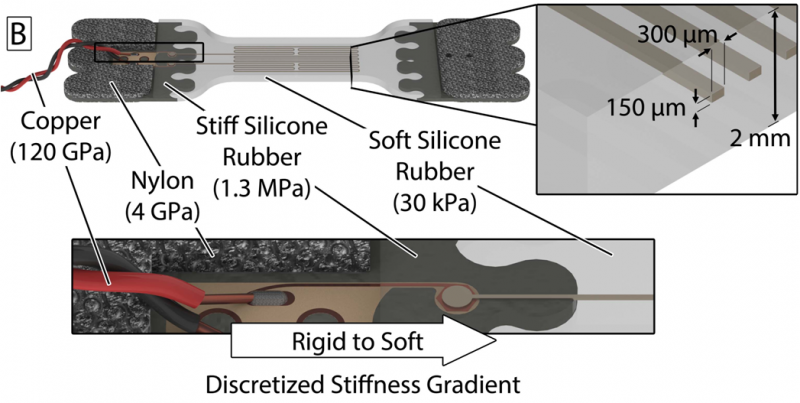
Discretized Stiffness Gradient
One of the challenges with devices that utilize soft materials is interfacing between the soft materials and hard materials within the device. The connection point between two materials with a large difference in stiffness usually becomes the point of failure of the device, through delamination.
Inspiration can be taken from nature, where these hard/soft interfaces are common. One example is the beak of a squid, which is very hard with a modulus of as high as 9 GPa, but is embedded in and actuated by soft muscular tissue. Analysis of the beak reveals that there is a large stiffness gradient from the beak tip to the base, spanning 2 orders of magnitude (Miserez et al. 2008).
The device design applies this as a “discretized stiffness gradient” in which 4 different materials are arranged in order of stiffness to gradually span the 7 orders of magnitude of difference in stiffness between the 120 GPa copper wire and the 30 kPa soft silicone rubber. By “distributing” this stiffness difference over multiple interfaces, instead of having one interface with a drastic jump in stiffness, the sensors are more robust in design and can withstand higher forces.