
Connecting the sensor
The sensors can be treated as variable resistors when creating a circuit for the purpose of testing. The resistance across the 2 wires coming out of the sensor will increase as the sensor is stretched (expect ~2.5 Ω when unstretched and up to 15 Ω when stretched by 200%).
By applying a precise, controlled DC current through the sensor, we can measure the voltage drop across the sensor (this reading should be amplified with an operational amplifier) and use that to accurately calculate the resistance across the sensor.
A simple way to log the sensor data is to hook up the sensor to a microcontroller with an analog-to-digital converter, such as an Arduino, and transmit the data to your computer. However, if you do this, make sure your circuit operates within the safe input voltage range of your microcontroller! If you are unfamiliar with microcontrollers, you can refer to this section from the Control Board pages for some basic instructions for working with an Arduino.
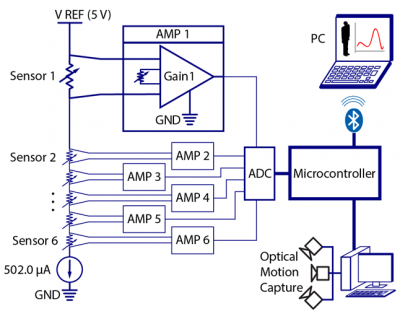
An example setup for a soft sensing suit using EGaIn sensors (Mengüç et al. forthcoming 2014)
Cyclical Testing
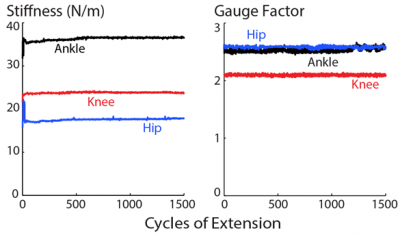
Another important requirement for sensors is reliability: they should behave consistently throughout their lifetime. Mechanical fatigue of the materials in the sensor can alter its behavior over time. To test this, the sensors described in this documentation were mounted in a tensile testing machine and cyclically loaded for 1500 cycles to nearly twice the maximum extension expected for the intended application (joint angle measurement), around 200% strain, and at the maximum extension rate possible on the testing machine (25 mm/s). Each sensor's mechanical (stiffness) and electrical (gauge factor) behaviors were monitored throughout.
As seen in the below graph, the sensors were consistent over the 1500 cycles, both mechanically and electrically. Fitting lines to the data and taking the slope shows that stiffness increased 0.34-2.5% for the different sensors, while gauge factor changed by around 0.05-2% (Mengüç et al. forthcoming 2014).
Compression Testing
A drawback of these sensors is that they are cross-sensitive to transversal compression (i.e. if pressure is applied perpendicularly to the flat face of the sensor, as opposed to stretching the sensor longitudinally). Since this also introduces deformation of the liquid metal channels, it also affects the resistance, and this resistance change can be misinterpreted as a change in extension and introduce error into the sensor readings.
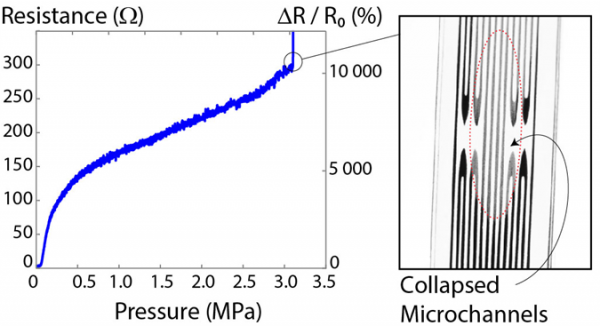
To better understand this behavior, a flat plastic punch with 10 mm diameter was used to compress the center of the sensor in a materials testing machine. A very slow rate of compression was used (0.0167 mm/s) to reduce rate-dependent viscoelastic effects. Plotting the applied pressure (load over the punch area) against the measured changes in resistance shows a nonlinear relationship (Mengüç et al. forthcoming 2014).
Above a certain compressive load (~3 MPa pressure), the microchannels will be squeezed shut, breaking the conductive liquid metal path, and resistance goes to infinity. However, this is temporary - gently massaging the collapsed area will reopen the channels and restore sensor function.
In all applications of these sensors care should be taken to mount them in such a way as to reduce the risk of compression contaminating strain readings. For example, in the case of wearable sensors for joint angle measurement, sensors are placed away from bony landmarks of the body, where impacts or falls could cause the sensor to be compressed against the landmark.
Failure Testing
|
Failure testing is used to determine the durability of sensors, and when and how they break. This information is useful for making sure that there is a sufficient factor of safety for your sensor application. To test the sensors described in this documentation, the sensors were placed under increasing load/strain until failure. There was a wide variation of failure strains even among sensors of identical shape and dimension. For example the 3 ankle sensors tested failed at strains of 247%, 339%, and 396%. This is due to manufacturing variability as these sensors are currently made by hand instead of an automated process (Mengüç et al. forthcoming 2014). |
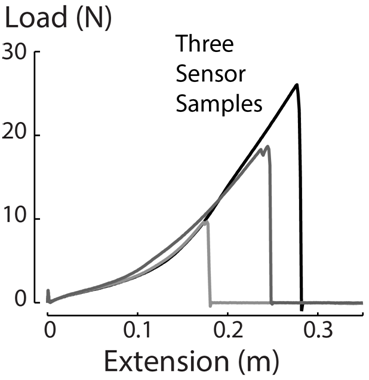 |
| While the sensors took different amounts of load to fail, all of the sensors failed in the same way: fracture at the interface between the stiff silicone rubber and the hook-and-loop fastener. According to the discretized stiffness gradient mentioned in the Design section, this particular interface spans 3 orders of magnitude from 1.3 MPa to 4 GPa, while the other interfaces only span 2 orders. Adding more steps to the discretized gradient to reduce these stiffness gaps may increase the amount of load that these sensors can withstand (Mengüç et al. forthcoming 2014). | 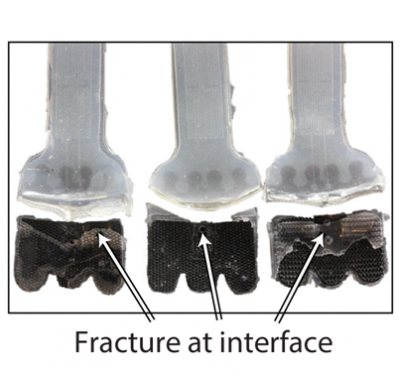 |