Case Study
|
This case study describes the design of a wearable device for hand rehabilitation, and is based on work carried out by Polygerinos et al. (2013). |
 |
Clinical need
Loss of grasping ability, whether caused by injury, disease, or other mechanisms, is a significant problem which negatively impacts quality of life in patients. It is possible to recover some lost function through intensive physical therapy, which typically involves the use of repetitive task practice (RTP).
However, RTP requires a therapist to assist the patient and guide the hand through the correct motions. As RTP also needs to be performed continuously for several hours, this results in high therapy costs and limits the number of patients a therapist can see. The aim of this project was to develop a wearable device to enable patients to perform RTP on their own, whether at home or in a clinic, in order to improve the accessibility and effectiveness of therapy.
Solution
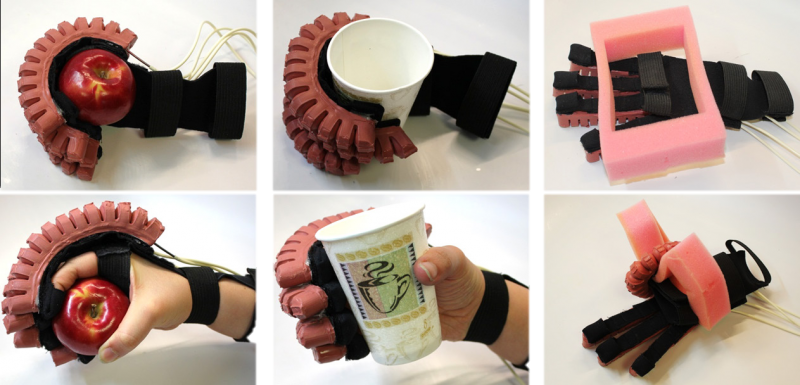
The proposed solution was a glove incorporating four PneuNets bending actuators sitting atop the fingers. When pressurized, the actuators bend and cause the fingers to flex, assisting in a grasping/close-fist motion.
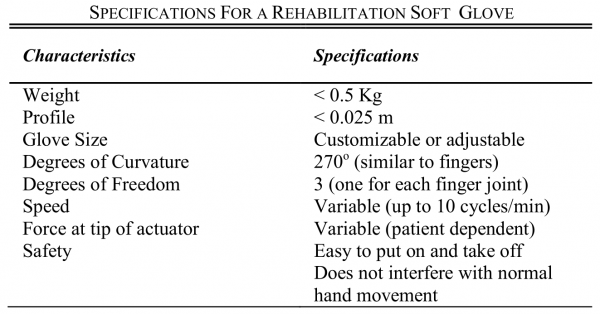
A list of required specifications for the glove was determined through a review of the medical literature and discussions with clinicians.
FEM analysis was used to predict the effect of changing various actuator design parameters and guide the design. This design was then fabricated and tested on an evaluation platform to validate the FEM results and verify that the required specifications were met.
To interface with the patient, the actuators were attached with thin Velcro straps to an open-palm glove, made of an elastic material (neoprene) that would conform well to the hand at all bending angles. Small pockets were added at the fingertips to secure the actuators to the fingers. The glove prototype was tested for its ability to grasp objects of a wide range of sizes, shapes, and stiffnesses.