Design
The dielectric elastomer actuators documented in this section consist of a soft, prestretched, dielectric membrane that is attached to a rigid circular frame. This section describes the overall design of the actuators as well as some of the design considerations involved in making your own actuator.
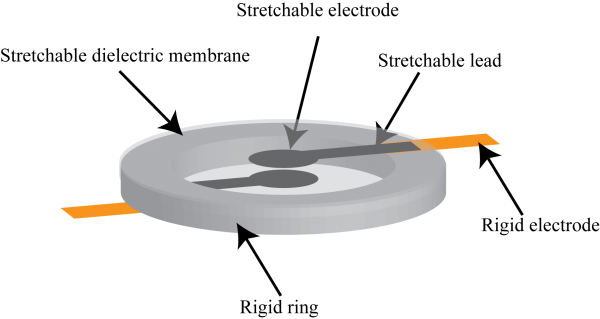
Circular stretchable electrodes made of carbon grease are painted in the center of the membrane on both faces. Each electrode is connected to the edge of the membrane through stretchable leads also made of carbon grease, but painted in opposite directions to avoid overlap of the two leads. At the rigid frame, the stretchable leads are interfaced with the environment through metallic electrodes made using copper tape. Upon application of a voltage the circular electrodes expand and the membrane decreases in thickness.
This design presented here is far from the only design possible for dielectric elastomer actuators. In fact, the working principle of dielectric elastomer actuators allows for a large number of different designs. The type of actuator described here is often used as a reference design to study the influence of material parameters such as electric constant, stiffness, and viscoelasticity on actuation performance. In addition, the influence of varying the prestretch, actuation voltage and actuation frequency can easily be investigated with this type of actuator. See the sections on material and morphology variations for discussions of how varying some of these design parameters affect the performance of the final design.
Variation: Material
Theoretically every soft, stretchable, insulating elastomer membrane can be used in dielectric elastomer actuators. However, the actuation performance is strongly influenced by the properties of the material. Materials with low stiffness and large fracture stretch often show larger actuation strains than stiff materials. The electric constant of the material determines the size of the Maxwell stress (see Modeling section) and therefore the amount of deformation the actuator undergoes. Materials with large dielectric breakdown strength allow the application of larger voltages and therefore larger actuation strains. On the other hand, viscoelasticity reduces the response time and efficiency of the actuators and these parameters are interconnected in many materials, so a compromise between these parameters has to be found.
The most studied classes of materials for dielectric elastomer actuators are acrylates, silicones and polyurethanes. The properties of exemplary materials are shown in the table below. Acrylic elastomers often have a high dielectric constants and dielectric breakdown strengths, but can have a pronounced viscoelastic behavior that limits the speed of actuation. Silicones usually have lower dielectric constants, but are also less viscous. Polyurethanes are a large class of materials and can have, depending on the formulation, very different properties. By changing the building blocks of the material, the properties of polyurethanes can be tailored to specific applications.

Variation: Prestretch
The prestretch of the membrane is a very important parameter to influence the performance of dielectric elastomer actuators. When the dielectric membrane is prestretched, it decreases in thickness. Since the size of the Maxwell stress is determined by the electric field across the membrane (see Modeling section), smaller voltages are required to obtain the same Maxwell stress when the membrane is prestretched.
The more important influence of the prestretch on the actuation performance is that it moves the occurrence of electromechanical instability (see Modeling section) to larger strains or even completely removes it, so that larger strains are possible before failure.
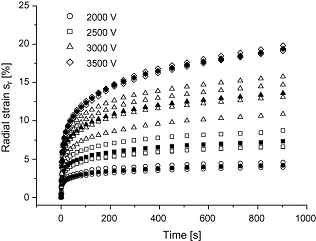
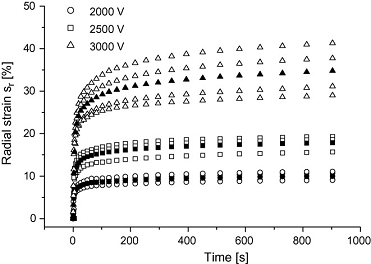
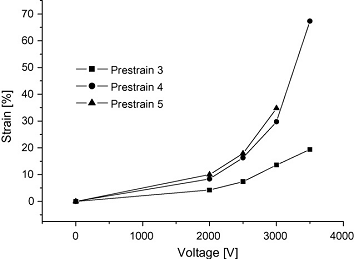
The following figures show the results of a study that investigates the effect of prestretch on the performance of circular dielectric elastomer actuators:
|
Prestretch 3x3 |
Prestretch 4x4 |
|
Prestretch 5x5 |
(Strain after 900s as function of voltage for different prestrains) |