
 |
A thin bend sensor can be integrated into the actuator, and in conjunction with an analytical model can give actuator bending angles and interaction forces. The sensor is first embedded separately in a thin layer of low-durometer silicone rubber (i.e. Ecoflex 00-30), and this sensing layer is then bonded to the flat face of the actuator using silicone glue. |
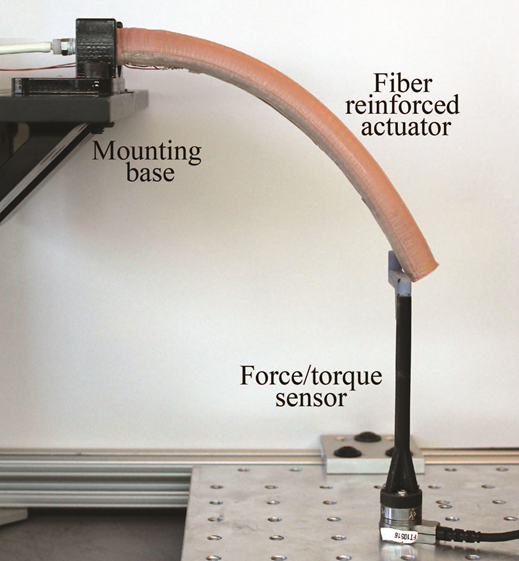 |
Fiber reinforced actuators can be characterized by using an evaluation platform like the one used to test PneuNets. As they are both bending actuators, similar tests can be conducted, i.e. measuring forces at the actuator tip using a 6-axis force/torque sensor. |
For position tracking of simple in-plane bending, image analysis can be used. However, since fiber reinforced actuators, unlike PneuNets, are capable of twisting and other out-of-plane motions, more advanced position tracking methods may be needed. One such option is electromagnetic 3-D tracking.
  |
Above, E/M sensors (3D Guidance TrakSTAR, Ascension Technology Corp.) are attached at various points along the actuator bottom face to characterize actuator behavior along its length, not just at the tip. Positional data is collected using the software provided by the manufacturer, and data can be analyzed and visualized in MATLAB.