
Two types of designs for soft pneumatic actuators are discussed here. The scripts and models available on the design tool enable customized variations in geometry, material properties and performance for these two designs depending on the desired application of study.
1. Single-Chamber Shell-Reinforced Actuators
The classical unconstrained multi-chamber actuator undergoes excessive inflation at high values of input pressure which can eventually lead to mechanical failure at the stress concentration regions such as the narrow connecting corridors or at the chamber wall peripheries. As a design improvement over the unconstrained actuators, novel shell-reinforced actuators have been developed. These actuators comprise two materials, one for the highly stretchable actuator core and the other for the unstretchable shell. The shell constrains excessive inflation of the actuator and guides it along the desired trajectory.
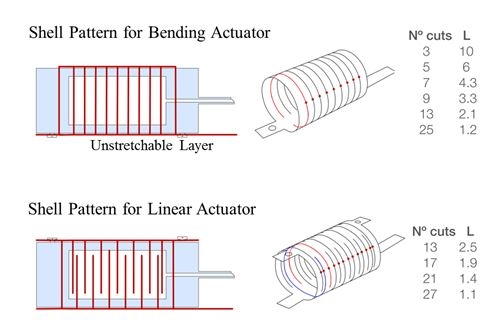
Two types of single-chamber actuators are studied - bending actuators and linear actuators. The shell patterns for these two different types of actuators are shown below. The slit number and slit width on the shell surface influence the motion and stress profile obtained. The design parameters include the chamber dimensions, wall thickness, shell dimensions and pattern, and material properties for both the shell and the chamber.
Furthermore, to remove the stress concentration regions at the chamber connection regions, only a single air chamber is created in this design. The images for these actuators in motion are shown below.

2. Classical Multi-Chamber Unconstrained Actuators
In this type of soft actuator, the actuator is comprised of multiple air corridors connected by narrow connecting passages for pressurization. The actuator is fabricated by attaching two identical halves with an adhesive. The entire unit is made of a single material. The material used in the present work is a highly stretchable silicone rubber material. The actuator is not constrained radially in this case. The design parameters include the individual chamber dimensions, air passage dimensions, wall thickness and material properties.

Two types of multi-chamber actuators are studied - bending actuators and linear actuators. The images for these actuators in motion are shown below.

