The final robot is comprised of a cast silicone body and a control system. The cylindrical silicone body contains empty channels which get inflated by the control system to propel the robot forward in a rolling motion. Flow to different channels is directed by 3-way valves, which are controlled by an Arduino Uno. One valve connection goes to a manifold connected to the pressurized source. Another connects to the channel in the silicone body, and the third is left open to exhaust the gas inside the channels when deflating. The valves are mounted on a PCB with all other electrical components. The pneumatic source for the untethered robot is a 16g CO2 cartridge (typically used for bicycle tire refills) connected to a miniature regulator. All of the control components are housed in acrylic rings which are set inside the silicone cast to hold its cylindrical shape. To move the robot forward, valves are actuated to inflate channels in succession around the perimeter of the robot. As the channel closest to the ground inflates, it pushes the robot over, causing the whole body to roll. The gait is currently open-loop, so the timing of channel actuation is not perfect. A future consideration would be adding a sensor for position feedback of the cylinder. This would allow for more accurate actuation of channels.

Robot mid-roll.
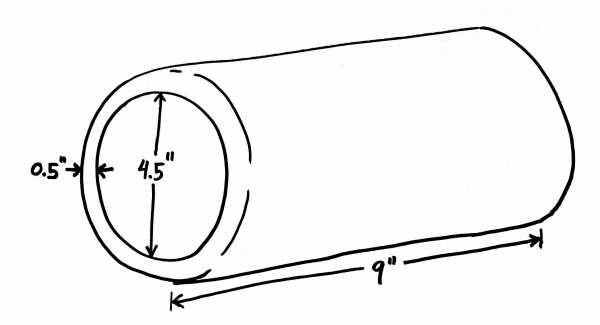
Overall Dimensions