
Object Retrieval Scenario
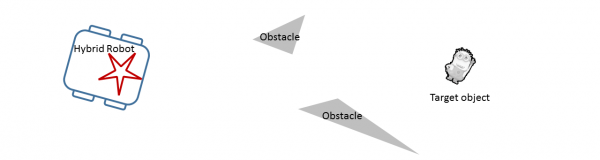
As a goal for demonstrating a working system, the team devised an example object retrieval scenario, described below. This scenario served to solidify the required functionality for the robot.
|
1) The hybrid robot (combination of rigid-bodied and soft robots) moves toward the target object (minion), which cannot be reached by the rigid-bodied robot due to obstacles. |
 |
|
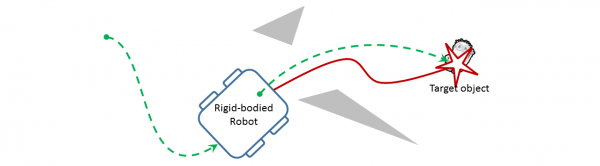
2) The rigid-bodied robot stops, then deploys the soft robot (red). The soft robot moves toward the object and grasps it once there. |
 |
|
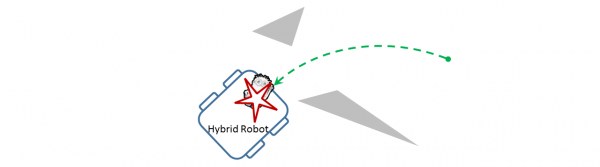
3) The soft robot, grasping the minion, returns to the rigid robot, and both are retrieved. |
 |
Design Criteria - Rigid-Body Robot
The design for the rigid platform is largely constrained by our ambitious task of demonstrating autonomous object retrieval. We require the robot to have size large enough to house and power all elements of a soft robot, specifically, the air manifold, valves, Arduino controller, and the soft robot itself. We also necessitate a vision system capable of tracking the location of the soft robot in 3D space. Next, we require the computational resources necessary to implement the object retrieval task in real time and integrate the functionality of both types of robots on a single host computer. One of the attractive features of soft robots is their cost effectiveness and portability. We lastly aim to extend these benefits to the hybrid robot, by keeping the hardware at a reasonable cost in a package that is relatively small and lightweight.
Design Criteria - Soft Robot
The soft robot is required to move anywhere in a planar environment bounded only by its support tether in a potentially cluttered space. Specifically, the robot is required to move in a circular domain with radius of at least 1 meter, and was required to climb over small objects and grasp a small item (both ball shapes of at least 1-inch diameter).