
The TacTip is a 3d-printed optical tactile sensor developed at Bristol Robotics Laboratory (Chorley et al, 2009). It aims to fulfil the need for a cheap, robust, versatile tactile sensor, mountable on industrial robot arms and aimed at eventual integration into robot hands for manipulation. The TacTip is available to order from us by email, or can be fabricated following online instructions.
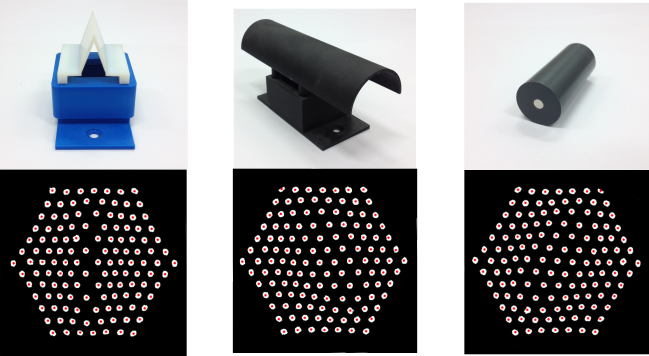
The sensor contacts objects with a compliant tip made from a moulded silicone rubber (Smooth-on Vytaflex 60) filled with a clear silicone gel (RTV27905). The inside of the tip comprises of a series of geometrically arranged white-tipped pins.

Pins deform when an object is contacted, and are tracked using an off-the-shelf Microsoft Lifecam Cinema webcam. Different patterns of pin displacement can provide information on object shape, object localization, contact force, torque and shear.
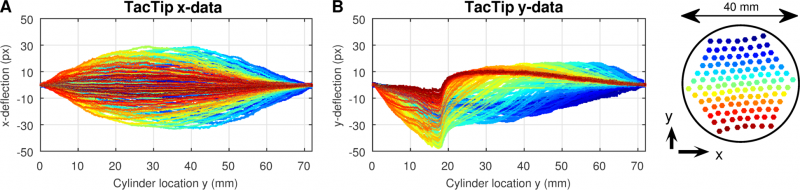
Pin positions are detected using OpenCV image processing algorithms and their x- and y-deflections are treated as independent taxels. The figure below displays an example dataset obtained by rolling a cylinder along a horizontal surface. Each color in panels A and B corresponds to a pin from the TacTip, as shown on the right-most panel.
By training the TacTip over given stimuli, we can then apply Bayesian algorithms to classify these stimuli. Using this approach allows us to apply the TacTip to a number of tasks, such as localization, object identification, contour following .... (see Testing section).