
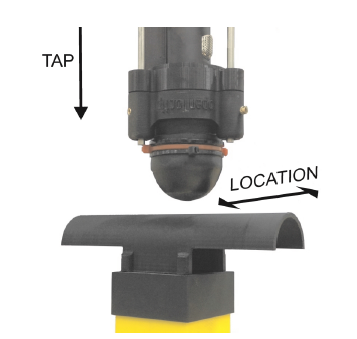
Localisation
The TacTip has been shown to achieve superresolved tactile sensing when tasked with estimating its location over a 40mm diameter cylinder (Lepora et al, 2015).
Superresolution encompasses a class of techniques that enhance the resolution of an image, notably hyperacuity where the resolution of a sensor is finer than the separation between its receptors. This is observed naturally both in human vision and touch as a consequence of sophisticated post processing in the brain.
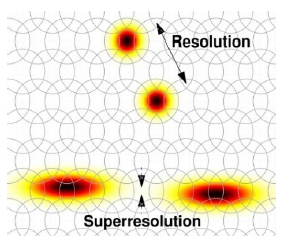
In this experiment the TacTip used in combination with Bayesian Sequential Analysis algorithms was shown to achieve a 40-fold degree of superresolution, with 0.1mm acuity compared with a 4mm spacing between tactile elements. This is comparable with tactile hyperacuity in humans, known to be of one order of magnitude.
Identification
The TacTip has also been proven capable at identification tasks. It was tested in identifying gaps of varying widths (range 0.25–5 mm) under depth uncertainty (Lepora et al, 2016).
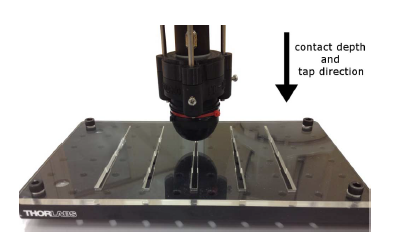
Using a similar sequential analysis approach to localisation tests, gap width is estimated to 0.35 mm, which is again comparable to human discrimination performance. Gap width identification has particular applications in quality control measurements during manufacture.
Contour Following
Applying these principles of localization and identification, the TacTip has been tested in a simple contour following task. This has practical implications for autonomous shape recognition. Here we tested the TacTip's capacity for contour following on 2D shapes. (Lepora et al, 2017).
Following a tap, the edge location and orientation relative to the TacTip is perceived using the same biomimetic approach as in the above examples. An exploratory move is then performed along the direction of the perceived edge using a 6-DOF robotic arm (IRB 120, ABB Robotics). The process is repeated until the TacTip has successfully followed the contour, as demonstrated in the following video.