Testing
This section firstly shows a complete manufacturing process of an HPN manipulator based on the design, modeling and simulation sections. Then, a protection test and performance measurement of flexibility and load bearing capacity are detailed for this HPN manipulator prototype. A few applications further validate this manipulator’s practicality. The purpose of presenting this testing process is to help readers determine appropriate methods to test the prototype’s performance, make comparisons with simulation results and guide the design.
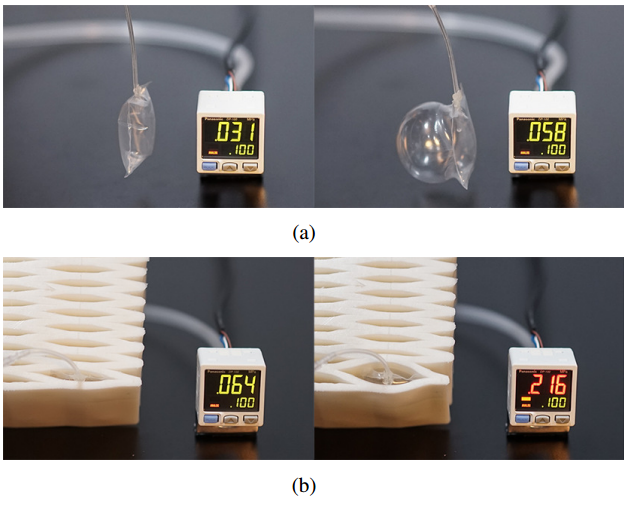
Protection test
The protection effect of the mainframe to the airbags is validated in this test. From the picture, it can be found that an airbag is fragile without protection: it makes irreversible deformation at a lower pressure (about 0.06Mpa); in contrast, it withstands a much higher pressure when surrounded by an HPN framework (about 0.216Mpa, 3 times of the former case).
A customized prototype
During the simulation section, we find how the manipulator’s flexibility and load bearing capacity vary with wall thickness and groove depth. For simplification, we do not select different wall thickness and groove depth for each single chamber, instead, we select 8 consecutive chambers as a segment, where the parameters remain the same. The whole manipulator is then constructed by 5 segments. As the segment becomes closer to the root ( horizontally fixed end), the load bearing capacity is expected to be stronger to hold the segments in front, so it needs thicker walls and shallower grooves.
The prototype is expected to have the load of 100 grams at an elongation of 50cm. The parameters selected for each segment are shown in the table aside, and it should be emphasized that the choices listed in the table are determined according to the importance sequence as: load bearing capacity > flexibility > wall thickness (the manipulator is expected to be lightweight so a thinner wall is preferred).
After determining the parameters, a prototype is fabricated, including a 3D-printed main framework with a kind of soft elastomer material (Polyflex), and airbags made of a kind of plastic membrane (Polyethylene/Polyamide, PE/PA).
| Mechanical Properties | 1-3 | 4 | 5 |
| Load moment (N·m) | 0.294 | 0.392 | 0.490 |
| Self moment (N·m) | 0.648 | 1.175 | 1.919 |
| Required moment (N·m) | 0.942 | 1.567 | 2.409 |
| Wall thickness (mm) | 2 | 2.5 | 3.5 |
| Groove depth (mm) | 3 | 4 | 4 |
| Selected moment (N·m) | 1.236 | 1.578 | 2.544 |
Flexibility test
This figure shows a process of measuring this manipulator’s flexibility (as mentioned in the calculation part, we focus on the spatial reachable space). From the two snapshots, we can find there is a deviation between the manipulator’s deformation in simulation and prototype experiment. The main reason is that actual airbags have air tubes with thicknesses about 4.7mm, which enlarges the cavity height, thus the manipulator’s original length is lengthened and minimum bending radius is enlarged. And the elongation rate decreases because the maximum length isn’t affected. (The prototype is constructed with segments with different parameters which also changes the deformation shape, yet not the main reason.)
Further, a list of comparisons in flexibility between our HPN manipulator and OctArm VI [1][2] are shown in the table. The OctArm VI has a big advantage in length over the HPN manipulator, so it has a much larger reachable space and better flexibility. While the HPN manipulator is better in minimum bending radius and elongation rate, so its flexibility would be larger when their original lengths are the same.
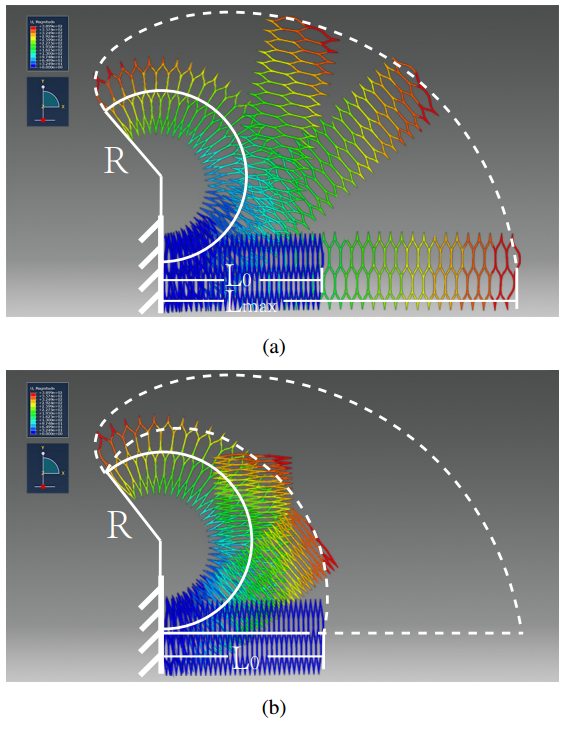
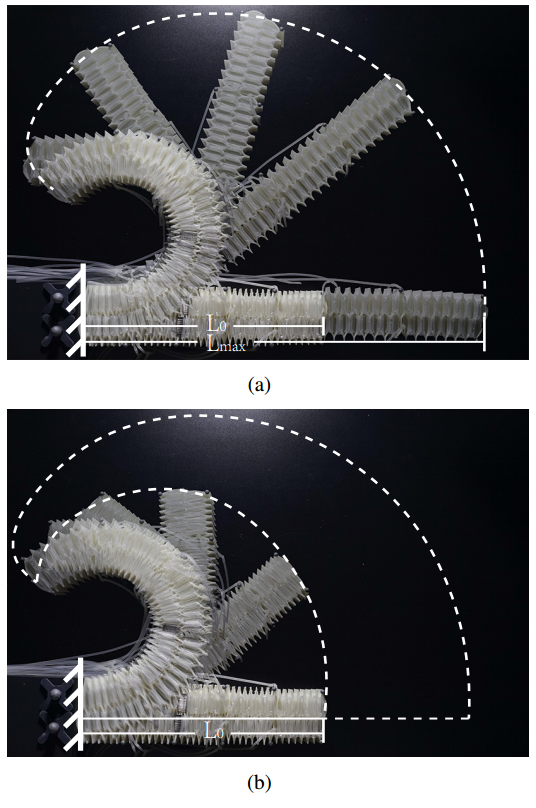
From the two figures above, we can see that both in simulation and prototype experiments, the manipulator’s reachable space is approximately measured by recording two boundaries and calculating the space between them. The manipulator is firstly straightly elongated from original length L0 to maximum length Lmax, and then deflated on the upper side from the fixed end to tip in order to bend upwards, leaving a record of outer boundary (white dotted line). When all the airbags on upper side are deflated, we record the manipulator’s minimum bending radius R. The inner boundary can also be recorded in a similar process, where the airbags on lower side are deflated from tip to fixed end (shorted white dotted line).
References:
[1]: Design and experimental testing of the octarm soft robot manipulator
[2]: Continuum robots and underactuated grasping
Load bearing capacity test
To increase the load bearing capacity, two supplemental segments are added as the root of the manipulator. For them, high load bearing capacity rather than flexibility is preferred. As shown in calculation section, the load moment increases as (k3−k1) increases, so the root segment is designed with asymmetrical grooves that only exist on the lower side. Therefore, the root part is capable of providing additional carrying capacity besides lifting the five segments above the horizontal line. Under the pressure of 90 Kpa, the manipulator exhibits a payload of 2.80N at a length of 63 cm. As mentioned in simulation, the manipulator exhibits a complicated shape instead of being straightly elongated under a load.

The manipulator withstands a heavier load in practical environments, because the manipulator usually winds to grasp or hold an object, which shortens the distance between the fixed end and the center of gravity of both the manipulator and the object, and thus lessens the load moment. In comparison with OctArm VI, the HPN manipulator has a less load moment. However, considering its load moment per unit pressure, HPN manipulator’s performance is better than OctArm VI (see the table below).
| OctArm VI | HPN Manipulator | |
| Length (m) | 1.127 | 0.630 |
| Load (N) | 8.89 | 2.8 |
| Load Moment (N·m) | 10.019 | 2.764 |
| Weight (kg) | 6.94 | 1.5 |
| Pressure (bar) | 5.51 | 0.9 |
| Load Moment / Pressure | 1.8183 | 1.96 |
Testing Manipulator’s Performance
The HPN manipulator’s performance shows great flexibility, load bearing capacity and ability to interface safely with humans. In the figure, (A) shows a process of grasping a ball by the HPN manipulator where it performs high compliance and flexibility; the manipulator exhibits high degrees of freedom as well as stability during movements in a fetching process in (B); (C) demonstrates a process of fetching a hammer and passing it to a man by the HPN manipulator, which shows proper load bearing capacity and cooperation ability.

Details: In (A), the manipulator first moves close to the ball, and then gradually bends to grasp it. After that, the manipulator bends to the opposite direction and place that ball on the top of a bottle. In (B), the manipulator first move a position where its tip can exactly hook the vial through a hole of only 1cm2. Then it stably moves towards the destination, adjusts the position elaborately and puts it down. In (C), the manipulator first bends downwards using its fourth segment, and then bends left to grasp a hammer, after that, it tightens and passed that hammer to a person by bending right using its root segment.
|
|