Case Studies
Tuning the Impact Response of Drones
 This case study describes the design of a Laminar Jamming Structure integrated into drones, here referenced as unmanned aerial vehicles (UAV). The work was carried out by Narang, et al (2018B).
This case study describes the design of a Laminar Jamming Structure integrated into drones, here referenced as unmanned aerial vehicles (UAV). The work was carried out by Narang, et al (2018B).
Two-Fingered Grasper
 This case study describes the design of a two-fingered grasper that can perform pinch or wrasp grasps, according to the pressure applied in its Laminar Jamming Structures. The work was carried out by Narang, et al (2018A).
This case study describes the design of a two-fingered grasper that can perform pinch or wrasp grasps, according to the pressure applied in its Laminar Jamming Structures. The work was carried out by Narang, et al (2018A).
Tuning the Impact Response of Drones
 This case study describes the design of a Laminar Jamming Structure integrated into drones, here referenced as unmanned aerial vehicles (UAV). The work was carried out by Narang et al (2018B).
This case study describes the design of a Laminar Jamming Structure integrated into drones, here referenced as unmanned aerial vehicles (UAV). The work was carried out by Narang et al (2018B).
Objective
To create a tunable device that can modify the impact response of Drones by adjusting the vacuum pressure applied.
Design
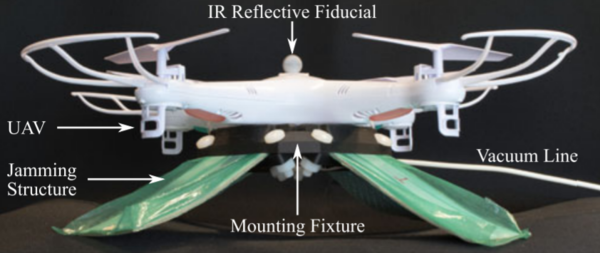
Four twenty-layer 125 mm × 50 mm jamming structures were fabricated. A 3D-printed fixture was designed that cantilevered the jamming structures at 30◦ from the bottom of a UAV, constituting landing gear. The tests were designed to simulate slow and fast landings of a UAV. It was hypothesized that for a given landing velocity, there existed an ideal vacuum pressure for the jamming structures that would simultaneously minimize peak forces on the UAV while also preventing its chassis from bottoming out (i.e., striking the ground). During each test, the vacuum pressure on all four jamming structures was set to the desired level.
|
|
Among the pressure conditions, the 36 kPa condition was ideal, as it exhibited lower peak forces and a higher decay rate. The preceding results demonstrate that jamming structures can also be integrated into traditional rigid robotic systems to rapidly tune impact responses. Furthermore, given their light weight, high damping force range, and effectively infinite damping resolution, jamming structures may constitute a compelling mechanism for active UAV landing gear
Two-Fingered Grasper
 This case study describes the design of a two-fingered grasper that can perform pinch or wrasp grasps, according to the pressure applied in its Laminar Jamming Structures. The work was carried out by Narang, et al (2018A).
This case study describes the design of a two-fingered grasper that can perform pinch or wrasp grasps, according to the pressure applied in its Laminar Jamming Structures. The work was carried out by Narang, et al (2018A).
Objective
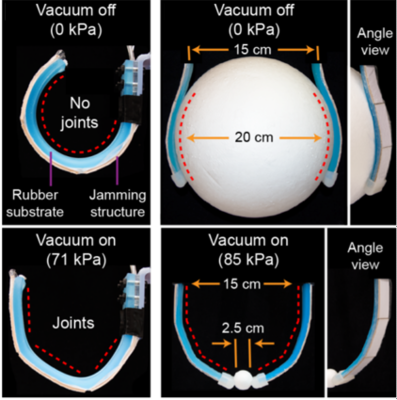
In robotic hands, compliant fingers that bend continuously can facilitate wrap grasps around large objects, whereas rigid fingers that bend discretely at joints can facilitate pinch grasps around smaller objects; it is challenging to design and fabricate hands capable of both. To accomplish the task, we built a two-fingered grasper in which each finger consisted of a cable-actuated variable kinematics system with a rounded fingertip.
Design

|
The proposed design is seen in the diagram in the left and is pictured in detail in the right. Three Laminar Jamming Structures are enclosed in an airtight envelope with narrow gaps in betweens them. Each fingertip in the two-fingered grasper has a cylindrical surface with a radius of 5 mm. The fingertips were cast using a two-part mold from PDMS rubber. The airtight envelope is glued to a rubber substrate. A cable is insrted through a channel in the substrate and tied off at the end to a plastic nut. Pulling the cable actuactes the finger.
When no vacuum was applied and the cables were pulled, the device could perform a stable wrap grasp on a ball of diameter 20cm. When vacuum was applied first, the device could perform a stable pinch grasp on a ball of one-eighth the diameter