Design
In this guide, we have provided instructions for two varying gripper designs. The two designs, however, have very different material and time requirements and approach robotics differently.
The materials for the electronic gripper cost ~ $150 and can take about two hours to construct once all the materials are gathered. In this gripper option, students can observe the connections needed to make the system work such as the Arduino, motor, switches and batteries. Created to be repositionable, the number, angle, and position of the fingers are easily altered to test various designs. Observing the SDM fingers as a part of a robotic system being controlled by microcontroller helps students understand the parts of a robot and all the various aspects that can customized for specific applications.
The manual gripper still allows for student led design decision however it calls for simple and inexpensive materials and assembly time is less than 15 minutes. This gripper allows students to experiment with the number and placement of the fingers on the handle and can be used as an intro into mechanical components of a gripper.
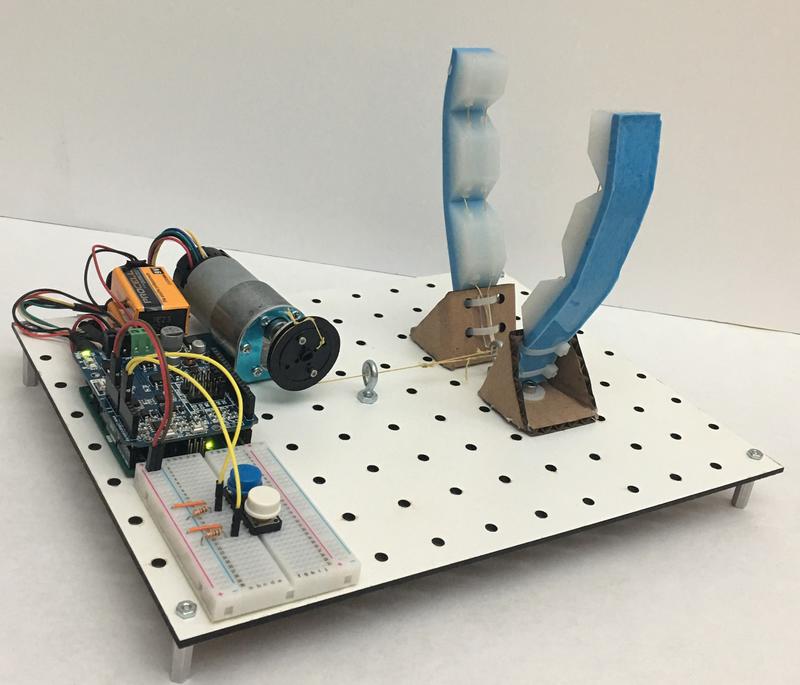
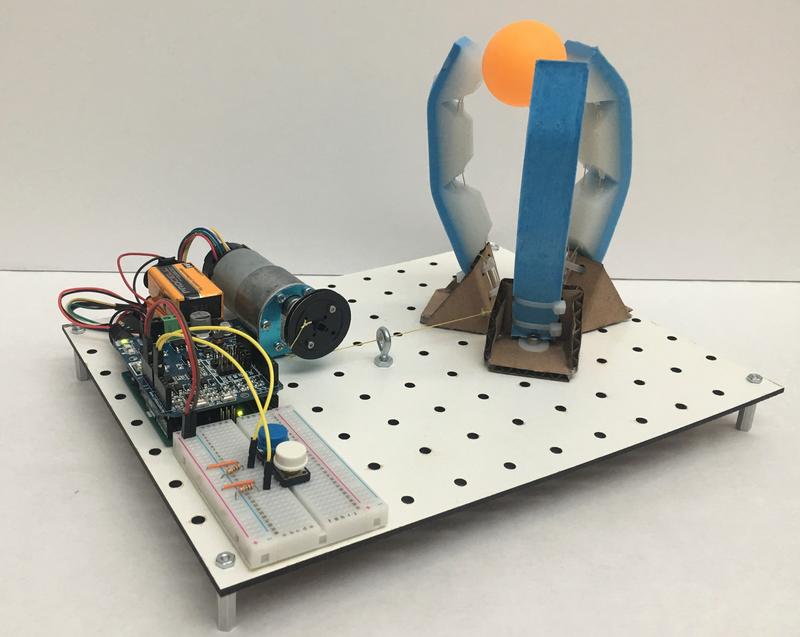
Electronic Gripper
Please note: we recommend that before beginning , both activities should be evaluated on a student-by-student basis to ensure the age and ability level is appropriate for the specific student population.
The electronic gripper is a simple circuit, motor and pully configuration that allows students to create a gripper that is customizable and reconfigurable to test various gripper designs. This design requires more materials and assembly than the manual gripper however, it can be completed in groups to create team challenges and save costs. The modifications that students can choose in the electronic gripper include:
- Number of fingers
- Configuration of the fingers on the pegboard
- Orientation of fingers relative to each other
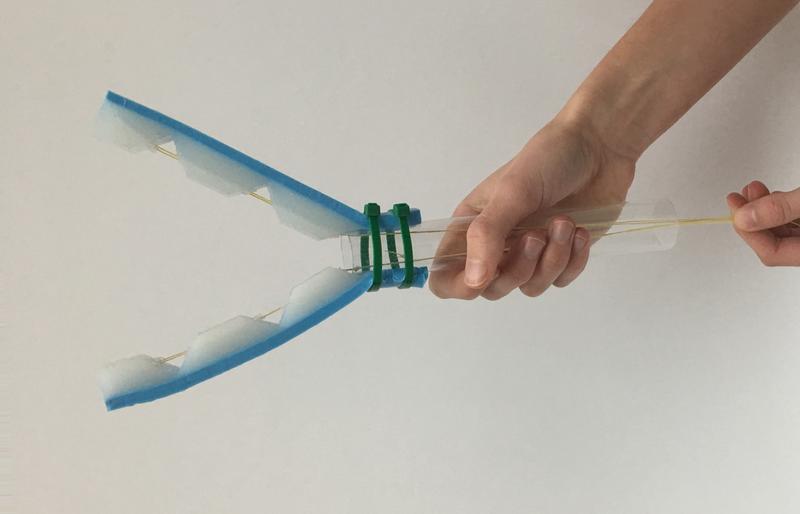
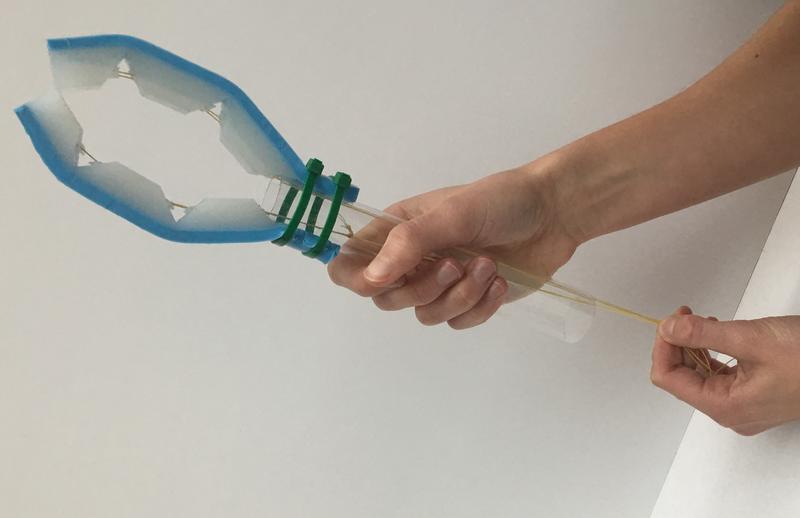
Manual Gripper
This simple, DIY gripper is simple solution for building a manually actuated gripper. This version helps students combine the SDM fingers into the component of robotic arm that can be endlessly customized. This design does not include any electronics, or sophisticated hardware however, students are still able to create and test a gripper that can have various configurations.
These variations include:
- Number of fingers
- Distance between the fingers
- Orientation of the fingers relative to each other