Design
Actuator components
- Elastomeric inner bladder – inflates when pressurized with fluid. Thinner bladders make the actuators more efficient, as less energy goes into stretching the bladder material, but if the bladder is too thin it will tear/pop easily, especially since it rubs against the mesh. The friction between the bladder and the mesh also contributes to actuator hysteresis.
- Braided outer mesh – constrains bladder motion, translates radial expansion of bladder into linear contraction. Utilizing asymmetric meshes can enable other motions such as bending or twisting, but require custom fabrication.
- End clamps – hold everything together, prevent slip of mesh relative to inner bladder, provide attachment point to mount actuator
Variation: Geometry
- Larger McKibbens with larger diameters can apply larger forces, but also need more air (so slower actuation for a given pump).
- Because actuator contraction is limited by a fixed ratio, to get increased travel of the actuator end, the original length of the actuator must be increased.
Variation: Bladder stiffness
The stiffness of the inner bladder can be changed by varying the material, using materials with different durometers and elasticities, or by varying the geometry, i.e. changing the wall thickness. Using the testing methods described here, the following effects of stiffness on actuator behavior were observed:
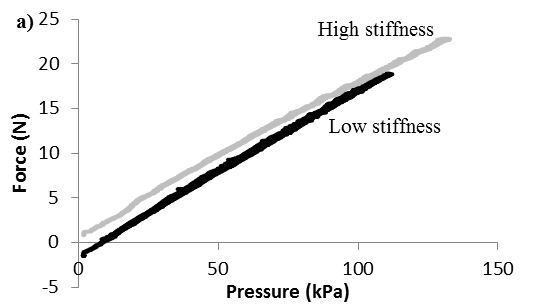 |
Isometric testing shows that the force-pressure relationship is independent of stiffness. As actuators were not allowed to contract, little energy goes into stretching the bladder material, and so the stiffness of the bladder material does not have a significant effect. |
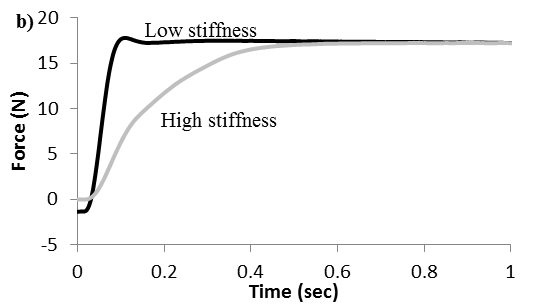 |
Stiffer actuators are slower to reach a given amount of force. |
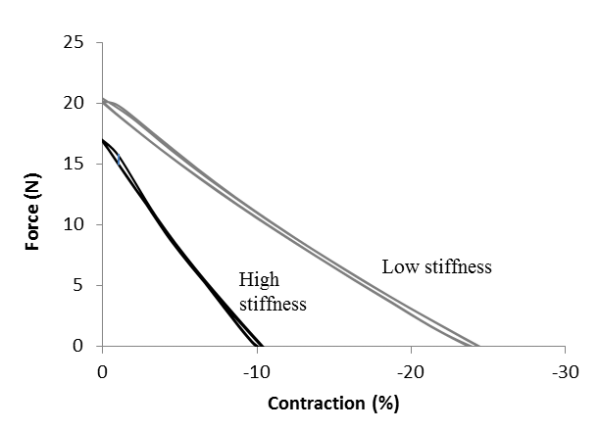 |
If pressure is held constant, actuators which are less stiff can reach higher contraction amounts and apply more force. |
Variation: Initial mesh braid angle
There is a wide variety of braided meshes available from manufacturers, with different diameters, materials, fiber sizes, etc. One important characteristic of braided meshes to consider during mesh selection is the initial braid angle.
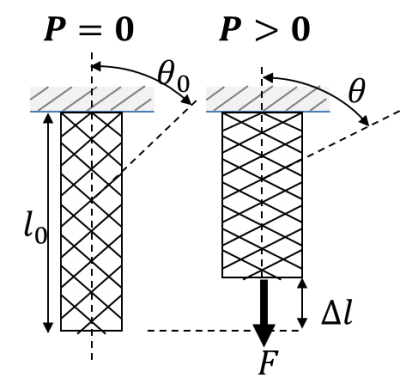 |
The braid angle is the angle formed between the longitudinal axis of the mesh and the mesh fibers. |
The braid angle can be measured by examining the mesh under a microscope:
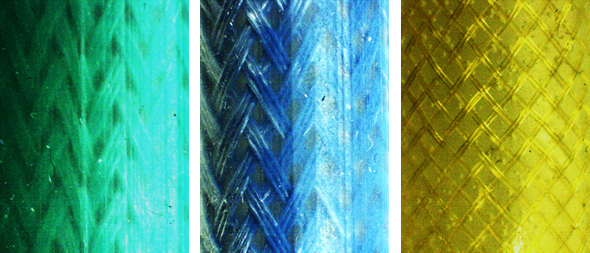
In general, lower initial braid angles are preferable. There is a neutral/"magic" angle of 54°, which can be derived analytically, at which no more axial contraction or radial expansion of the mesh can occur. Mesh braid angles typically start below this neutral angle, and move toward it as the actuator contracts. Therefore, meshes that start at a lower angle will have a longer "stroke length" and contraction percentage, with corresponding higher forces.
Varying braid angle has the following effects:
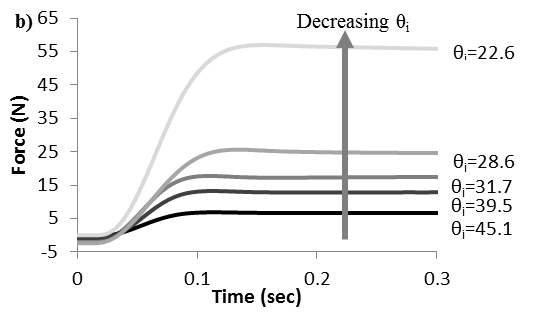 |
In dynamic tests, actuators with lower braid angles achieved higher forces, and reached those maximum forces more quickly. |
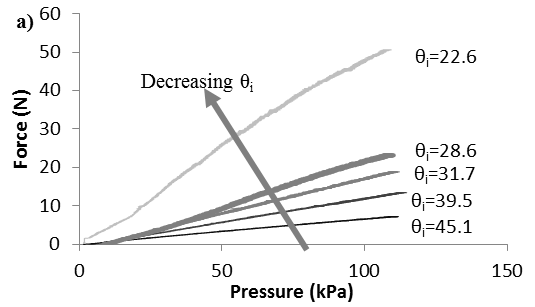 |
In quasistatic isometric tests, actuators with lower braid angles achieved higher force for a given pressure. |
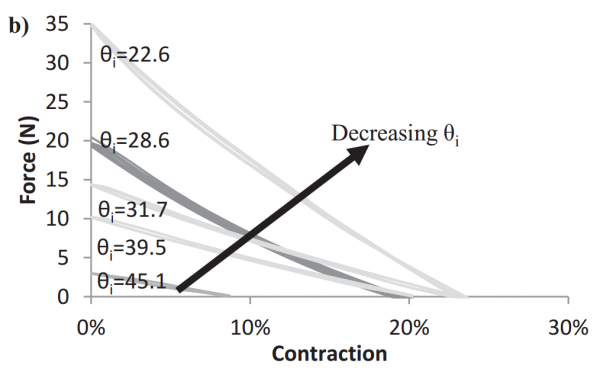 |
In constant pressure tests, actuators with lower braid angles achieved higher forces and contraction amounts. |