Multi-Module Variable Stiffness Manipulator
The manipulator integrates three modules made by Silicone Ecoflex 0050. The arm is pneumatically actuated with low pressures (0 - 650 mbar) and it is able to bend and elongate. An external braided sheath optimizes the 3D motion performance. A granular jamming mechanism is integrated inside each module allowing the stiffness tuning of the manipulator.
With appropriate modifications, the manipulator can be used for manipulation of objects, exploration of unknown environments or surgical procedures. In the Case Study section a medical application is presented.

| Some of the information contained in this web site includes intellectual property covered by both issued and pending patent applications. It is intended solely for research, educational and scholarly purposes by not-for-profit research organizations. If you have interest in specific technologies for commercial applications, please contact us here. |
Design

Manipulator architecture

The modules have been connected by means of silicon pipelines (outer diameter = 1.5 mm) passing through the actuation chambers. A total of nine tubes are housed in the manipulator: three for each module. They supply the pressure inside the actuation chambers thus the modules move. These tubes are made of soft silicone which allows easy integration and maintains flexibility during motion.
Actuation System

Here, a movie on the motion performance of the single module is shown:
Variable Stiffness Mechanism

Below is an example of three membranes in-series connected is shown:
Activation Set up
Modeling
Theoretical studies and models on the single module and on the manipulator have been conducted. In this section, the Finite Element Analysis, the theoretical stiffness evaluation and a mechanical model are reported.
FEA simulation
FEA simulations of the module when one chamber is actuated are reported in Elsayed et al. Results relative to the single module can be analytically extended to the multi-module configuration.

Stiffness Evaluation
In De Falco et al., the soft manipulator has been studied in terms of variable stiffness. The stiffness has been theoretically calculated for a 10% compression in axial direction of the manipulator. Reuss model and composite materials properties have been applied to the module scheme and then extended to the manipulator.

From Reuss model we know that:

where V1,2,3,4 are the volume fractions of Part 1,2,3,4 indicated in Module scheme and E1,2,3,4 are the respective Young's moduli. The elastic moduli of the single components are:

For the composite parts of the module the elastic moduli are given by:

- actON, vacON: all 9 chambers are actuated with the same pressure (650 mbar), granular jamming is simultaneously activated in all 3 modules (980 mbar vacuum pressure).
The following graph shows the results relative to the theoretical stiffness evaluation.

Mechanical model

In this case, the mechanical behaviour of the module can be studied taking into account the low length/diameter ratio of the module for which:

Elastic modulus is calculated as already explained above, using Reuss model and composite materials rules. The area moment of inertia is calculated considering the crossing section of the module and the sum of the single moments due to the different components of the section:

where sil indicates the silicone module, ch the actuation chambers, SC the stiffening channel and n the ratio between EGJ and Esil.
The shear modulus is calculated as:
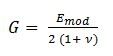
where Poisson value, ν, is 0.5, typical of rubber materials. For the shear factor, χ, we use 10/9 that is relative to circle section.
If you know the maximum imposed deflection, you can calculate the maximum force, because the other parameters of the equation are geometric so you already know them. In the following graphs, the values of the Young's modulus, the moment of inertia and the maximum force are reported. They have been calculated considering the data discussed before and a deflection of 10 mm. The module is 50 mm in length and 25 mm (without sheath) in diameter. When this model is applied to the manipulator (three modules), the different length has to be considered.

Fabrication
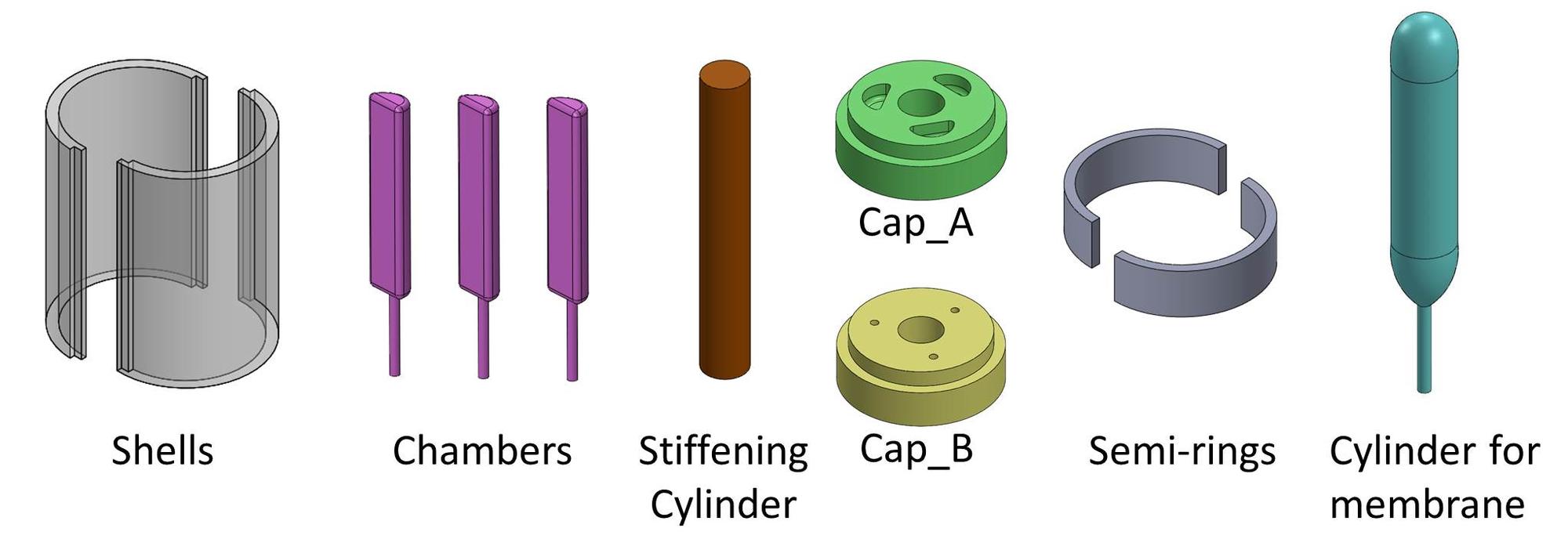
The steps for obtaining a multi-module manipulator are:
- Fabrication of the single modules;
- Fabrication of custom membranes for managing the granular jamming;
- Thermoforming of the sheath;
- Integration of all components.
The final result is the manipulator shown in the following movie:
Bill of Materials
This section will give a list of items that are used in this project. You can download a more detailed Bill of Materials sheet here.
Note: Many of the items listed are just examples and you can use your own discretion to substitute parts which are easier or cheaper to obtain.
Molds
From Download Section you can download the .stl files for these molds. They can be printed with a 3D printer.
Materials

Tools

Equipment

Modules Fabrication
The multi-module manipulator is composed of three modules in-series connected. This section presents the details for the fabrication of the single modules.
Fabrication of Module 3
1.2. Place the cup in a degasser machine at 1 bar vacuum pressure for about 10 min. When the air bubbles are completely removed, the silicone is ready to be used.
2.1 Assemble the mold (a), close the shells around it and pour the silicone up to the edge of the shells (b).
 2.2 Place the mold in the oven at 60 °C for about 30 min.
2.2 Place the mold in the oven at 60 °C for about 30 min.2.3 Remove shells and cap_A (c), reverse the module and insert cap_B (d), close the shells so that their edges are aligned with the stiffening cylinder (e). Pour the silicone inside the rearranged mold up to the edge of the shells (f).



After these steps, you have a module (Module 3 of the manipulator) able to move when the air is supplied by the yellow tubes. This module does not yet include granular jamming and external braided sheath. If you actuate the module, you have the typical "balloon effect" as shown in the following pictures and movie (please note that the central transparent piece is just a plastic support where the module is placed).

Fabrication of Module 1 and Module 2
Granular Jamming Membranes
With this steps you can fabricate custom membranes, in particular the granular jamming membranes to be inserted in the central channels of the modules.
1. Fabrication of the granular jamming membranes
The membranes fabrication is based on Latex material because it ensures good performance when the vacuum is applied. However, you can choose to fabricate the membranes with another material, for example the Ecoflex 0050 Silicone, if you do not need a strong vacuum level.
1.5 Remove the membrane from the mold (c).
Remember to fabricate 3 membranes, one for each module of the manipulator (Membrane 1, 2, 3).

2. In-series connection of three granular jamming membranes
2.1 Cut two plastic tubes to 12 mm length and one tube to a longer desired length (300 mm for example).
2.2 Cut three squared pieces of about 100 mm2 of nylon tissue. Close both the ends of the short tubes with this tissue using Parafilm or superglue, then close only one end of the longer tube.
2.3 Fill the Membrane 3 (that is the membrane of the Module 3) with 4 g of powder coffee, insert one short tube (the end with the filter) inside the filled membrane and fix it around the tube using Parafilm.
2.4 Insert the other end of the same short tube inside Membrane 2 holding its top side directly with the tube and fix it around the tube using Parafilm. Fill Membrane 2 with 4 g of powder coffee.
2.5 Repeat 2.4 for connecting Membrane 2 to Membrane 1.

3. Insertion of granular jamming membranes into the manipulator
3.1 Apply the vacuum with the vacuum pump on the freeside of the long tube (the membranes become stiffer).
3.2 Insert Membrane 3 inside the empty central channel of Module 3. Slide Module 2 up to Membrane 2 passing the long tube through the central channel. Repeat for Module 1 up to Membrane 1.
Now you have three modules with granular jamming integrated in the central channels.
Braided Sheath
The external sheath is fabricated starting from a commercial one.
5. Let the sheath cool down and remove the internal cylinder (c).

The sheath fabrication is based on a simple procedure. Remember that the development of the crimps has to ensure the necessary space to insert the module and the right distance between the crimps. These features ensure the right behavior of the module when the chambers are inflated. The sheath has the function to limit the radial expansion of the silicone when the chambers are inflated, avoiding the “balloon effect” showed in Design Section. Close crimps improve the expansion of the silicone along the motion direction optimizing the bending and the elongation movements. In addition, particular care is needed when heating the sheath because an overheating could degrade the material.
Manipulator Assembly
Now you have all elements for mounting the manipulator:
- 3 granular jamming membranes in-series connected and inserted inside three modules;
- One crimped braided sheath.
The mounting process for obtaining one manipulator consists of three main phases:
Phase 1. Connection by tubes. Climp the tubes of Module 3 with tweezers and insert (forcing) them inside the actuation chambers of Module 2. Fix the tubes on the top of Module 2 with silicone glue. Insert new tubes inside the base of Module 2 and fix together with the tubes coming out from the chambers of Module 2. Do the same for Module 1. It is very important that the tubes inside the chambers are longer than the chambers (see the figure), so that their function is guaranteed during the motion of the modules.

Phase 2. Silicone junctions. In order to connect the modules, pour Dragon Skin 10 between modules using one semi ring mold with 25 mm diameter. Put the semi ring around the modules and pour the silicone from one side. Repeat from the opposite side. The distance between modules is 5 mm. The junction is not actuated and it does not include the granular jamming based stiffening channel. It has been designed in order to minimize its non-active effect on the system performance and not to prevail on that. For this reason we use a stiffer silicone and we tried to minimize the space between modules.

Phase 3. Integration of external braided sheath. Slide the crimped sheath around the manipulator. For fixing the sheath on the top side of the manipulator, close the rings around the top and push 2 crimps of the sheath inside. Pour 2 g of Ecoflex 0050 into the rings. Wait until the silicone is dried and repeat the same phase for the bottom side.

This integration strategy permits to have free space in the manipulator usable for the integration of other tools like sensors, camera or gripper. However, this technology is limited to the integration of 3 - 4 modules. This is due to the tubes that pass inside the actuation chambers. A future optimized solution could be based on a modular approach in which miniaturized valves are on-board integrated at the base of each module, limiting the number of the actuation tubes inside the manipulator.
Testing
This section describes some tests which have been carried out to characterize the soft manipulator. The motion range of the manipulator has been analyzed and the experimental stiffness has been compared with the theoretical one shown in Modeling Section.
Motion Evaluation
In De Falco et al., a motion evaluation of the manipulator is reported. A 6 degrees of freedom tracking probe has been fixed on the tip of the arm and the different positions during the motion have been acquired with the Aurora EM tracking system.

The following figures show how the manipulator elongates and bends when different actuation chambers are actuated with the pressure range of 0 – 650 mbar. The colour of the curves corresponds to the actuation of the same coloured chambers.




Stiffness Characterization
- actON, vacON: all 9 chambers are actuated with the same pressure (650 mbar), granular jamming is simultaneously activated in all 3 modules (980 mbar vacuum pressure).
Below the experimental set-up, the results and the comparison with the theoretical evaluation are reported.

As shown, the stiffness is mainly influenced by the vacuum actuation. Theoretical results underestimate experimental ones of about 0.13 MPa, probably due to the presence of the tubes and sheath not considered in the model illustrated in Modeling Section.
Case Study
The presented manipulator can found application in different fields like manipulation, retraction, exploration or surgery. In this section a medical application of the manipulator is shown.
Current procedures in Minimally Invasive Surgery, such as laparoscopy, single port laparoscopy and natural orifices translumenal endoscopic surgery, are performed with rigid or semi-rigid tools [Vyas et al.]. Soft technologies allow to design manipulators with high dexterity [Laschi et al.] which are able to move inside the body with high compliance and safety, reaching different districts of the body, by controlling their stiffness during the interaction with tissues.
The soft manipulator is suitable for abdominal procedure in which the arm is inserted in the abdominal wall from an access port. In order to make the arm functional in a working scenario, the tip of the manipulator has been equipped with a custom gripper and a miniaturized camera which are two fundamental elements for operating.

The pneumatic gripper has been designed for this specific application. It is normally closed and it opens when the pressure is supplied. The maximum pressure for opening the gripper is 950 mbar which corresponds to 61 degrees opening. The commercial camera has white leds integrated, a resolution of 640x480 pixel and a framerate of 30 fps (frame per second).

The design of the inteegrated manipulator is the same presented in the previous sections, but it includes two channels more for housing one pneumatic tube for actuating the gripper and electric wires for the camera supply.

In order to test the functionality of the manipulator, pick and place tests have been performed. The user is sat in a remote control station in which the video acquired from the on-board camera is displayed. Looking at the video streaming, the user can move the manipulator controlling it with a joystick and a dedicated user interface.
The task consists in picking the peg from one position of the pegboard and place the grasped peg in a different assigned position of the pegboard.
The following pictures and movie show the set-up and the pick and place task.


Future works will focus on an optimized control of the manipulator in order to improve the accuracy of the motion reducing the tremor visible in the video. In addition, the miniaturization of the arm will be implemented. Preliminary prototypes show the possibility to reduce the diameter of the manipulator up to 14 mm which corresponds to a feasible value for surgery instrumentation. Further study on the stiffness possibilities for the soft manipulator will be conducted taking into account other technologies like fiber jamming and layer jamming. Some materials will be changed in order to meet more stringent biocompatibility requirements.
Downloads
CAD files for molds: "Parts" file
STL files for printing the molds: "stl" file
Detailed Bill of Materials: "Materials" file
| Some of the information contained in this web site includes intellectual property covered by both issued and pending patent applications. It is intended solely for research, educational and scholarly purposes by not-for-profit research organizations. If you have interest in specific technologies for commercial applications, please contact us here. |
| stl.zip | 168 KB | |
| parts.zip | 461 KB | |
| materials.xls | 25 KB |