Testing
|
This section describes the results of the testings. To verify the performance of the prototype system, a few experiments were pursued. First of all, basic performances of the pump and McKibben actuators were measured. Second, installing the system in the swing robot, it was confirmed that the design worked as intended. Finally, the swing robot was operational. Back to the goal of the project, the team accomplished building a tether-less hydraulic system using alcohol as the working fluid. The results of performance tests suggest that the flow inside of the actuation system is powerful and controllable accurately. Though the prototype is small enough to install in the swing robot, there remains room for improvement in terms of the size. It is significant that we can introduce this method to make tether-less hydraulic systems using basic prototyping tools. Original goals
|
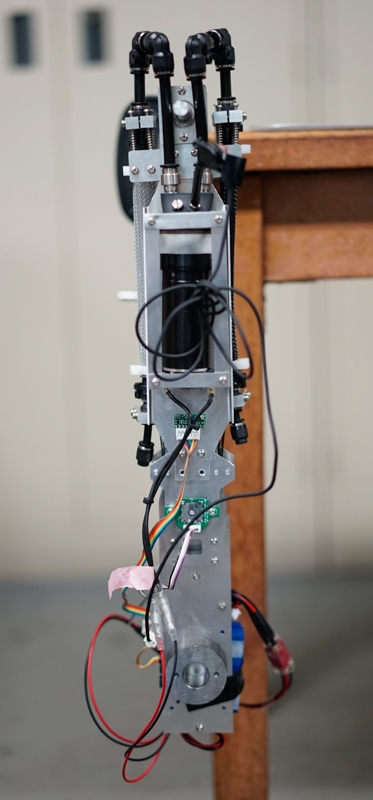 |
Basic Performance
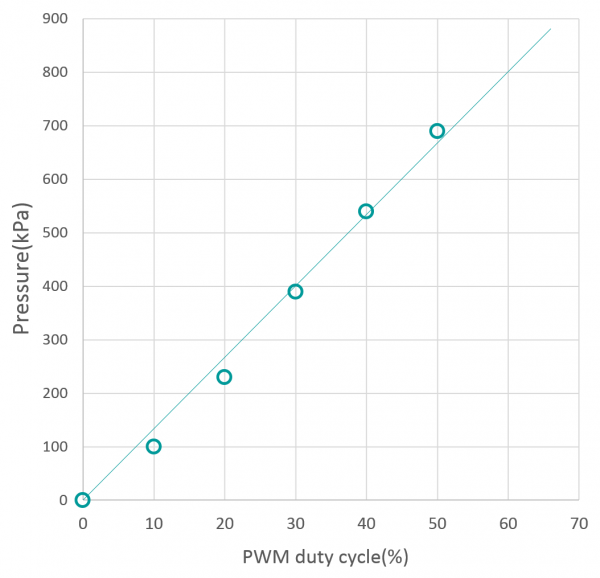
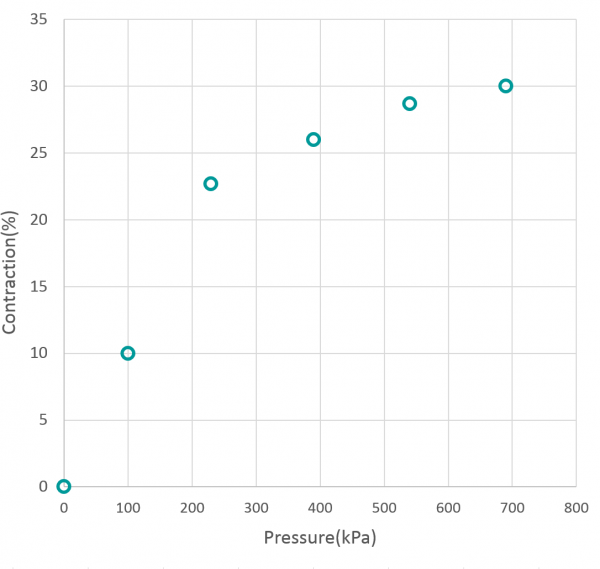
The prototype of the pump and McKibben actuators were tested, and each graph shows the results.
Condition: No load
Power source: 4-cell lithium polymer battery (14.8V)
PWM duty cycle - Pressure Rate
Pressure - Contraction Rate
Control Test
Test Operation
The video below shows the motion of a pair of McKibben actuators.
Testing of the Belt Tensioner
The belt tensioner avoids slack of the timing belt. The mechanism works properly.
PID Control
The team programmed a micro controller for the experiment of PID control to the powered shaft with no load. The PID control is be described below.
|
Rpwm |
Rate of pwm (0.0~1.0) |
|
y(t) |
Difference between target value and sensed value (unit :degree) |
|
kp,ki,kd |
PID control parameters |
![]()
Parameters used this time are:
kp: 0.027, ki: 0.0013, kd: 0.0013
The following graph shows the result of a tracking test. Although there were some overshoots, angle sensor values tracked the reference signal with good responsiveness.

Swinging Test
Finally, the swinging robot driven by the actuator (timing was manually controlled) was tested. Maximum amplitude was approximately 35 degrees. The demonstration showed that the joint of the actuation system rotated quickly and it was elastic (not stiff).