Design and Project Goals
Our goals for this project were as followed:
- Research and outline a potential for soft robotics in architecture
- Design a soft robot that inflates and deflates to control heat transfer in building skins
- Integrate smart materials and microcontrollers for a dynamic system design
- Create a pneumatic actuator soft to the touch and lightweight
- Create a design for an autonomous soft robotic network
- Fabricate a prototype of a soft robotic element that can be tested
- Analyze the results and weaknesses of our design, prototype and gathered data
The design of the Soft Barrier incorporates aspects from the PneuNets actuator. Soft Barrier consists of two main types of actuators. One type creates a series of stacked air pockets to control conduction in the design, while the other creates a larger deformation of the robot’s surface to manipulate air turbulence.
The latter actuator displays great similarities to the PneuNets actuator and uses internal air chambers to create a larger curving deformation. The former actuator uses a flat mold to create an actuator with a nonlinear movement, inflated through a series of incorporated air pockets. Just like the PneuNets actuator, Soft Barrier Robot also uses a number of layers that are adhered together. The major difference between the PneuNets actuator and the Soft Barrier Robot lies in the geometry of the air chambers and hence the final deformation. While the goal of the PneuNets actuator is used to create a bending movement, the Soft Barrier uses the air chamber to inflate without bending but with a very high degree of control over the actual air volume in the system. The design comprises of four layers of silicone. One layer is made with a sturdier silicone (Dragon Skin- 30) to stabilize the entire actuator assembly.


Materials
The initial project phase included the design, development and fabrication of soft actuator prototypes. They were instrumental in incorporating the material behaviors into the design phase. The main body of the soft robot is composed of silicone. This material is extremely versatile and can be easily cast into a large variety of shapes. Its extreme flexibility and strength is instrumental for the pneumatic actuation. Furthermore it allows incorporating thermochromic and phosphorescent pigments into a material composite.

The search for the right material was crucial to our design. Five different types of rubber silicone products from Smooth-On were tested: Ecoflex -10, Ecoflex-30, Ecoflex-50, Dragon Skin-30 and the Dragon Skin-50. The final material selection included Ecoflex-50 and Dragon Skin-30, which had the desired flexibility and strength.
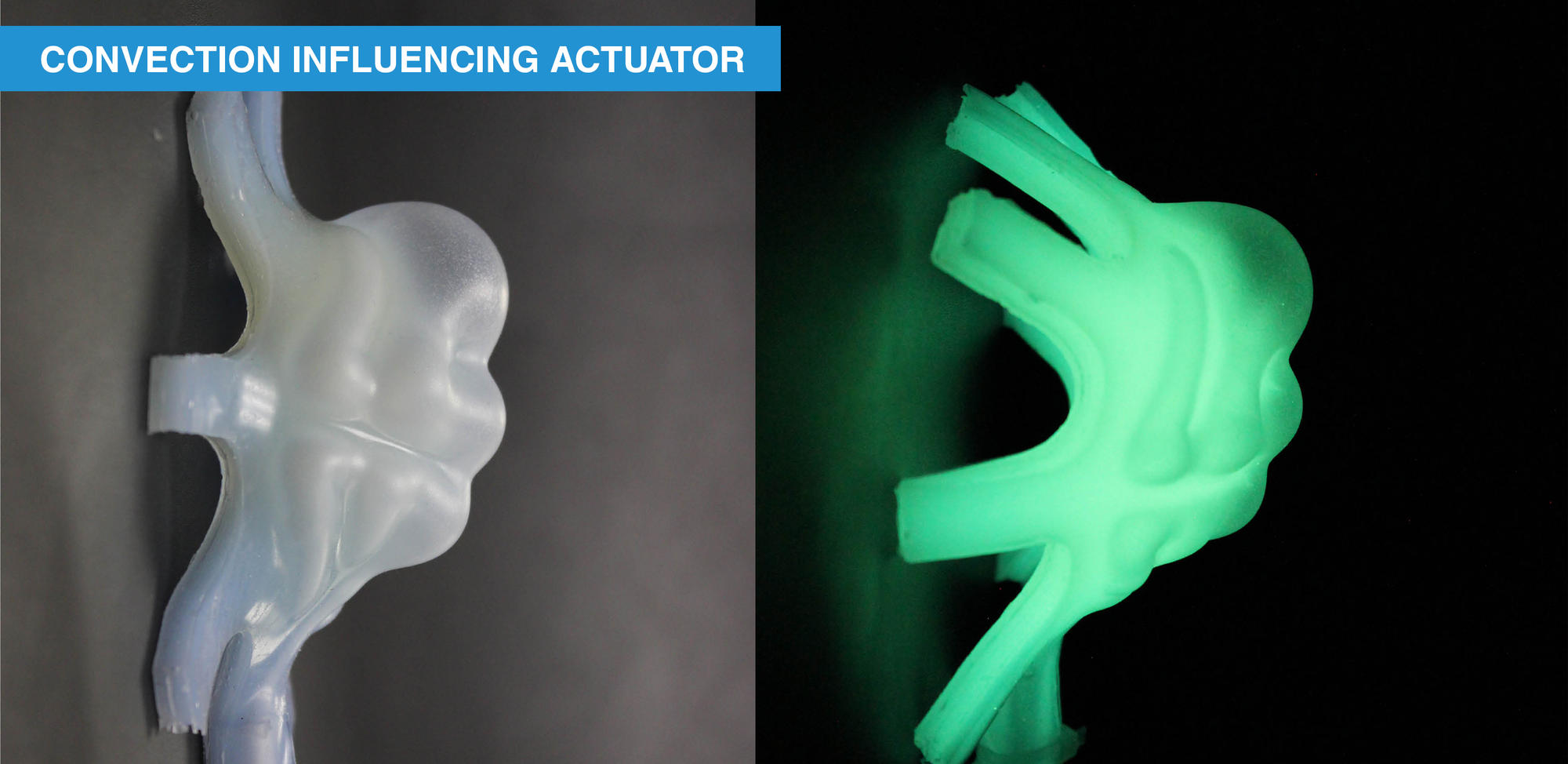
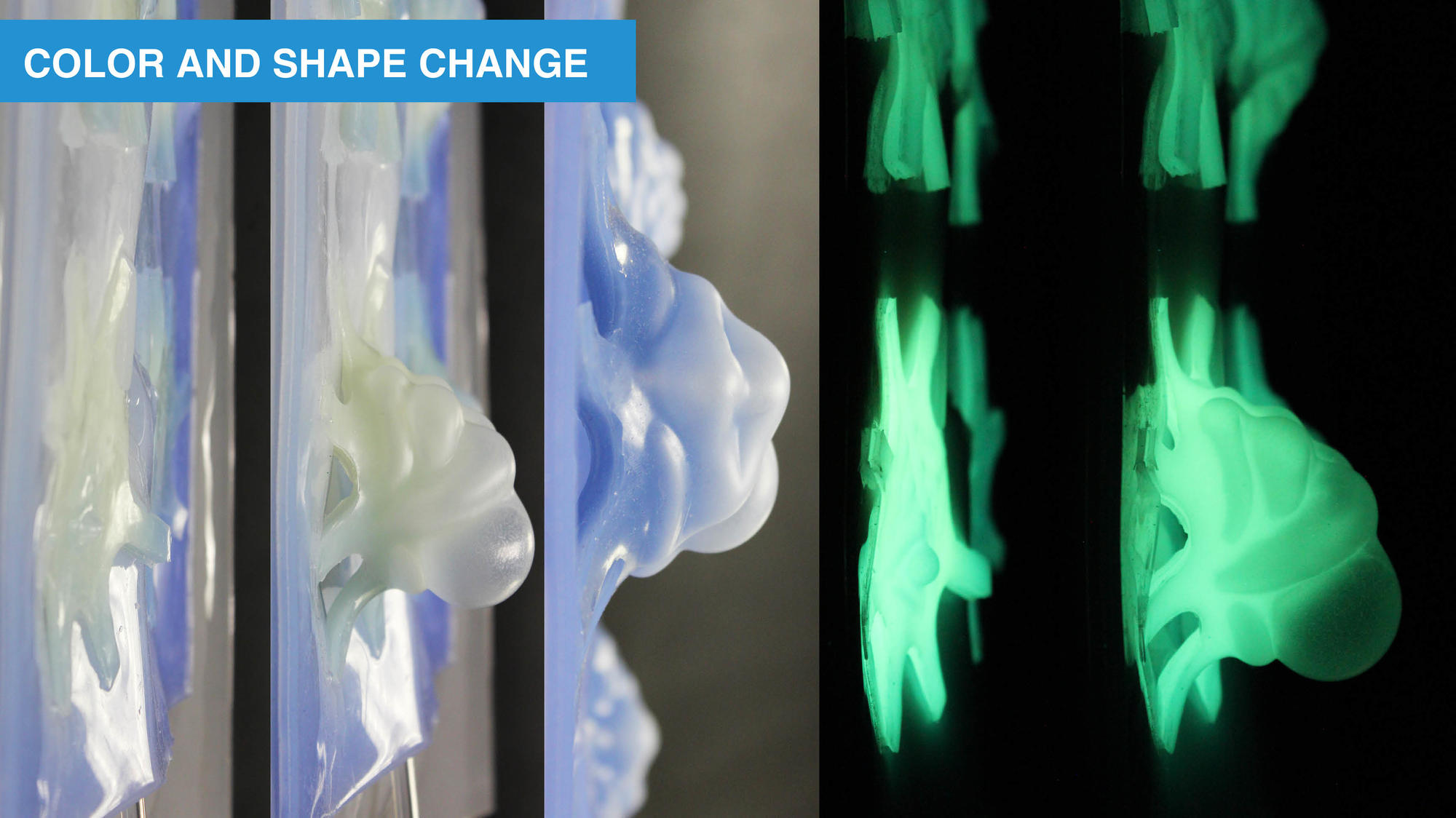
Thermochromic and phosphorescent pigments were introduced into the project. Thermochromic pigments change their color depending on the ambient temperatures present. This serves to absorb or reflect solar energy during different times of the year and different seasons. Cold winter temperatures allow the material composite to darken and absorb more solar heat gain. Hot summer temperatures allow the surface to whiten and reflect the solar heat gain back into its surroundings. The phosphorescent pigments absorb energy from the sun during the day and emit it slowly during night time. They are incorporated to remind users in darkness about the energy conservation of the system.


Manufacture

A simple geometry is used throughout the design in order to allow for an ease of fabrication and reproduction. The idea called for the creation of sandwiched silicone layers with embedded air chambers which is flexible enough to stretch and bubble up when inflated. Thickness was taken into consideration and allows for each panel to inflate with ease as well as weigh less. The thinnest layer in the Soft Barrier is 1/16” (1.5875 mm) thick with one being 1/8” (3.1750 mm) thick.
The manufacturing the prototype by hand called for extreme precision. The molds for each design were laser cut from acrylic sheets ( with varying thicknesses) and carefully assembled. During the mixing process it was important to prevent the formation of bubbles in the silicone. This was achieved by gently folding the two silicone components together with the pigments into a smooth mixture. The pouring process had to be executed in a time effective manner to prevent the early setting of the materials.
Automation

The future goal of the project would call for automation, a dynamic system that has the ability to adapt to varying conditions. The soft robots are meant to interact with each other through a series of microcontrollers and sensors. Every microcontroller would connect to a mainframe computer system to allow for overrides and changes. Temperature sensors would read the temperature fluctuation in the interior and the exterior environment to determine if pneumatic elements should be active or dormant. Pressure sensors and contact switches would activate micro diaphragm air pumps located on each panel to facilitate the necessary inflation of each robot.
References: