
You can find more tutorial files listed here: https://project.inria.fr/softrobot/install-get-started-2/tutorial/
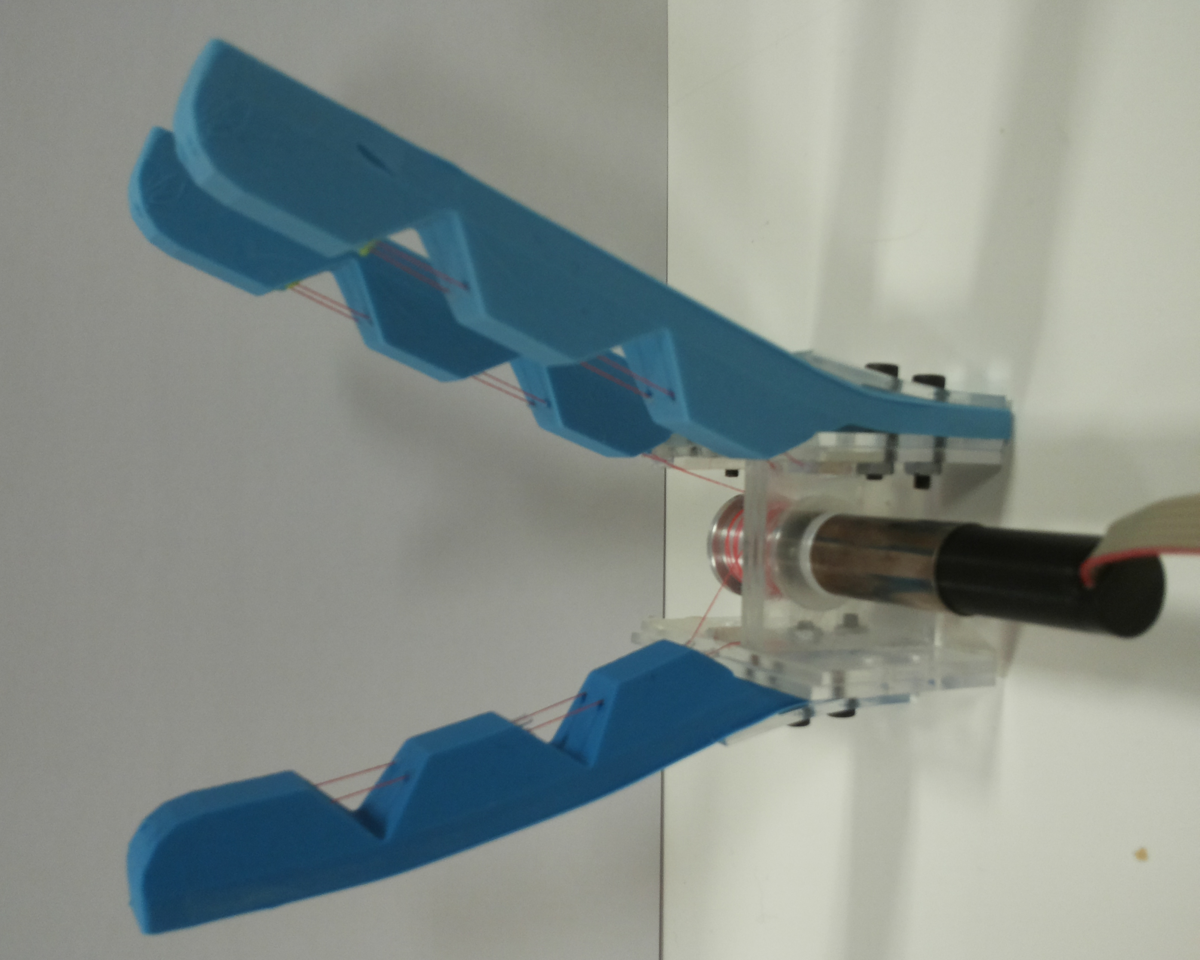
In this tutorial, we will see how to use our framework to create and use a mechanical simulation of a soft robot. As an example, we choose to model the soft gripper made by Taimoor Hassan and his co-authors in [Manti et al. 15] and [Hassan et al. 15]. As visible in the picture, the soft gripper is a “single actuator for three fingers" system made of a soft material. The use of a naturally compliant material facilitates object pretension.
Our approach attempts to provide a precise mechanical modeling of the simulated robot. This includes the geometry of its different parts as well as its deformation law and the associated properties. In this tutorial, we assume these are known and simply need to be added into our simulation framework.
This video is presenting all the different steps of the tutorial:
We would like to thank Taimoor Hassan and his co-authors for letting us use their robot design in this tutorial.