Hot Glue Kit
Hot-Glue-Kit is a soft robotics toolkit developed in the Biologically Inspired Robotics Laboratory which aims to enable the construction, actuation, control and simulation of functional soft robots easily in a very short time. Fast prototyping and easy actuation control helps the users to build their first soft robot designs, observe and analyze their behavior quickly so that they can understand and improve their robots. This kit speeds up the robot building, testing and analyzing process and enables a quick re-design phase for multiple iterations. These features also makes it a very suitable tool for education as by fast building, it lets students explore the opportunities and challenges of soft robotics (Yu et al., 2014)
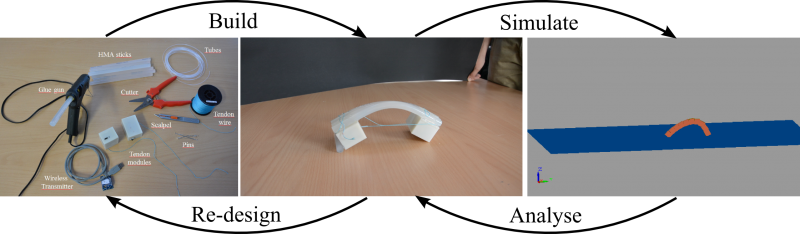
Hot Glue Kit allows 3 main functions: the robot construction, actuation and simulation. Each function can be used independently or together to have a complete soft robotic platform.
Robot Construction

The main innovation comes from the usage of hot melt adhesives (HMAs) for the construction of main robot structure. The thermoplastic and thermoadhesive properties of the HMA allow the fast and easy fabrication of soft robot prototypes with complex geometries, continuum limbs and joints by extruding and gluing custom continuum pieces together. HMA has adequate elasticity to sustain soft deformations and support structural weight.
Soft Actuation

Unlike rigid joints, soft joints have virtually infinite degrees of freedom. Therefore, they require a special actuator to capture most of the motion range. Tendons are intuitive solutions to soft actuation as they are soft continuum structures which can conform to soft joints. Hot Glue Kit provides a small (3x4x5 cm) wireless-controlled motor module that can pull up to 11N of tendon force and can easily be glued or attached on the robot.
Simulation

The Hot Glue Kit offers a simple simulation library which uses (2nd gen) Sim Mechanics tools from MATLAB to simulate the soft robots and tendon modules. The library allows the construction of soft robots by a combination of many small rigid cubes that are attached to each other with spring damper systems. Tendon and contact forces are also included to capture the interaction between the robot, tendon modules, and the ground.
Video
This documentation set contains files and instructions to support the design, fabrication, modeling, and testing of a specific soft robot built with the Hot Glue Kit components. We also provide a case study where our kits are used as a part of hands on sessions during the Soft Robotics Week in Livorno, Italy in April 2015. The principles presented here can be used to build various robot designs.
Some of the information contained in this web site includes intellectual property covered by both issued and pending patent applications. It is intended solely for research, educational and scholarly purposes by not-for-profit research organizations. If you have interest in specific technologies for commercial applications, please contact us here.
Bibliography
Wang et al. (2012) Physical Connection and Disconnection Based on Hot Melt Adhesives
Wang et al. (2013) Large-Payload Climbing in Complex Vertical Environments Using Thermoplastic Adhesive Bonds
Nurzaman et al. (2013) Active Sensing System with In Situ Adjustable Sensor Morphology
Yu et al. (2014) Soft Robotics Education
Wang et al. (2014) Mechanics and energetics in tool manufacture and use: a synthetic approach
Contributors
Utku Çulha
Fabio Giardina