
Knit textile bending actuators are a class of soft actuator that is being developed by the Biodesign lab at Harvard University. The basis of the design utilizes layers of fabric with different stretch properties to achieve complex motions such as bending, twisting, extending, or any combination of the three. A single actuator with multiple motions can be made by adding multiple layers and creating multiple pockets to put additional balloons into.
|
|
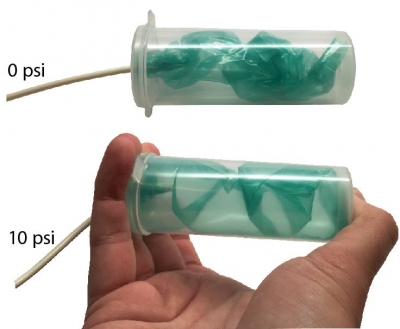
| With any balloon, an increase in air mass leads to an increase in balloon volume. |

|
| However, when a balloon is constrained to a maximum volume, an increase in air mass leads to an increase in balloon pressure. The energy that would have strained the balloon instead gets transmitted to all surfaces that the balloon touches. This example constrains a balloon with a rigid container. |
|
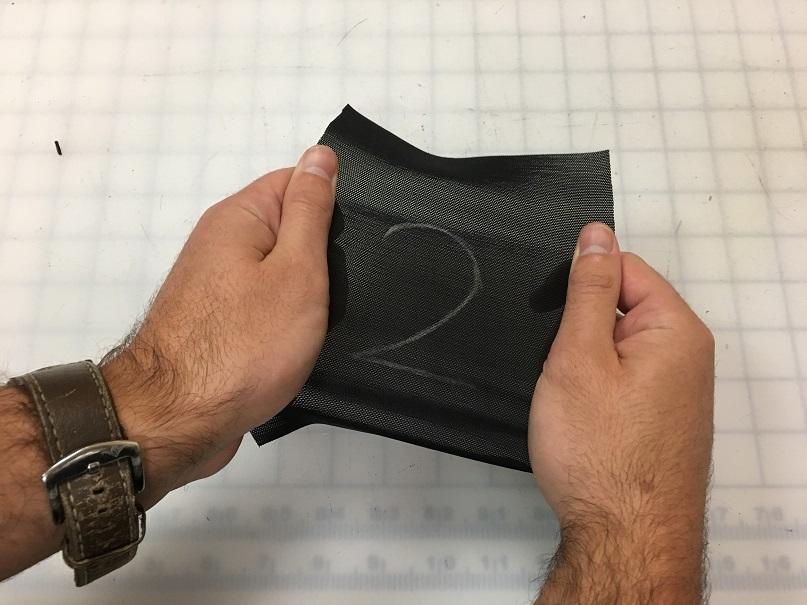
| Now consider what happens when a balloon's volume is constrained by soft materials that can stretch, such as fabric. Just like with a rigid container, the balloon's air pressure transmits its strain to all surfaces that it touches. In this case, the transmitted strain causes the fabric to stretch. How much the fabric stretches is based on the type of material as well as how much air pressure is in the balloon. Take for example two different fabrics of the same geometry, one (1) which is quite stretchy, and another which is woven (2). Below, the same tension is applied to both materials, and fabric 1 stretches more than fabric 2. While this may seem obvious, it's a very important concept for this technology. In a textile actuator, the air pressure applies the same tension to all materials it touches. Therefore, interesting motions can be created by sewing different combinations of fabric together and putting a balloon inside. |
|


| If we sew fabric 1 on top of fabric 2 and put a balloon inside, we can create a bending actuator similar to the video above. As the balloon inflates, the air pressure causes fabric 1 to stretch more than fabric 2. In order to maintain equilibrium, the actuator must take on an arc shape. Any combination of bending, twisting, and extending can be achieved by selecting specific materials for the top and bottom of the actuator. More on this in the design section. |

|
Compared to Fiber-Reinforced actuators, textile actuators have some advantages and disadvantages. Textile actuators are much lighter than fiber-reinforced actuators as well as operate at about half the pressure to produce a similar stiffness. Actuators operating at a lower operating pressure can run off of a smaller pump which requires a smaller power supply. This makes textile actuators much better suited for wearable applications as these components can be compacted to attach to a person's belt or wheelchair. Additionally, textile actuators are better suited for wearable applications because they are made using commercially available materials and tools that are already used in clothing manufacturing such as a sewing machine and impulse sealer.
Fiber-reinforced actuators have a much more complicated fabrication process, but this allows the designer to make surface features on the actuator. As mentioned previously, fiber-reinforced actuators require more pressure to achieve similar stiffness. This is mainly due to energy lost in straining the elastomer. However, the energy that goes into straining the elastomer will help the actuator return to its neutral position when deflated. Depending on the application, this can be beneficial. Textile actuators are completely compliant when not actuated, and in turn they do not return to their original state when depressurized.
This documentation set contains files and instructions to support the design, fabrication, and testing of a textile actuator. Additionally, there is a case study of how multiple textile actuators can be combined to create a soft assistive glove.
Some of the information contained in this web site includes intellectual property covered by both issued and pending patent applications. It is intended solely for research, educational and scholarly purposes by not-for-profit research organizations. If you have interest in specific technologies for commercial applications, please contact us here.