Materials
The initial project phase included the design, development and fabrication of soft actuator prototypes. They were instrumental in incorporating the material behaviors into the design phase. The main body of the soft robot is composed of silicone. This material is extremely versatile and can be easily cast into a large variety of shapes. Its extreme flexibility and strength is instrumental for the pneumatic actuation. Furthermore it allows incorporating thermochromic and phosphorescent pigments into a material composite.

The search for the right material was crucial to our design. Five different types of rubber silicone products from Smooth-On were tested: Ecoflex -10, Ecoflex-30, Ecoflex-50, Dragon Skin-30 and the Dragon Skin-50. The final material selection included Ecoflex-50 and Dragon Skin-30, which had the desired flexibility and strength.
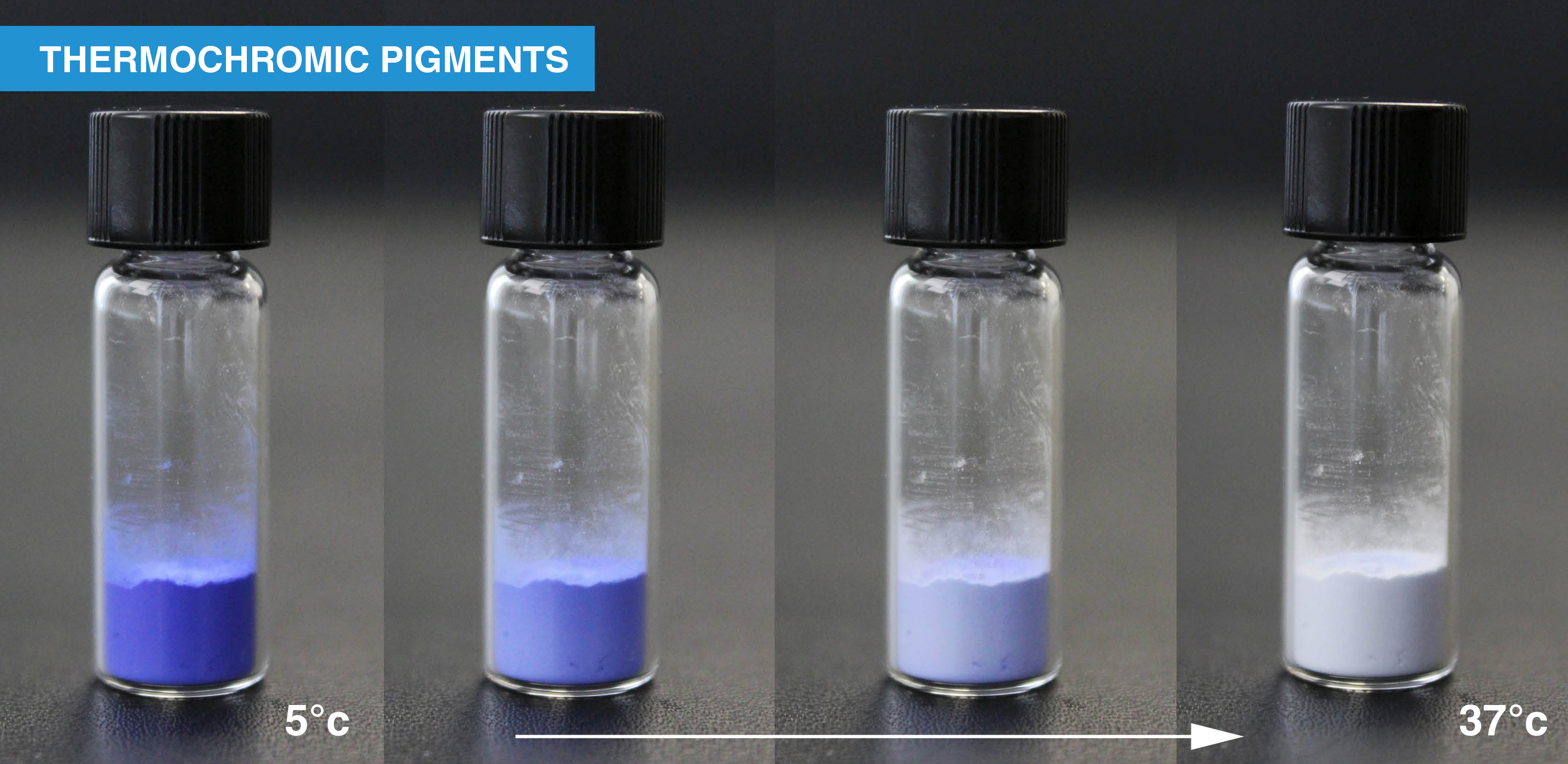
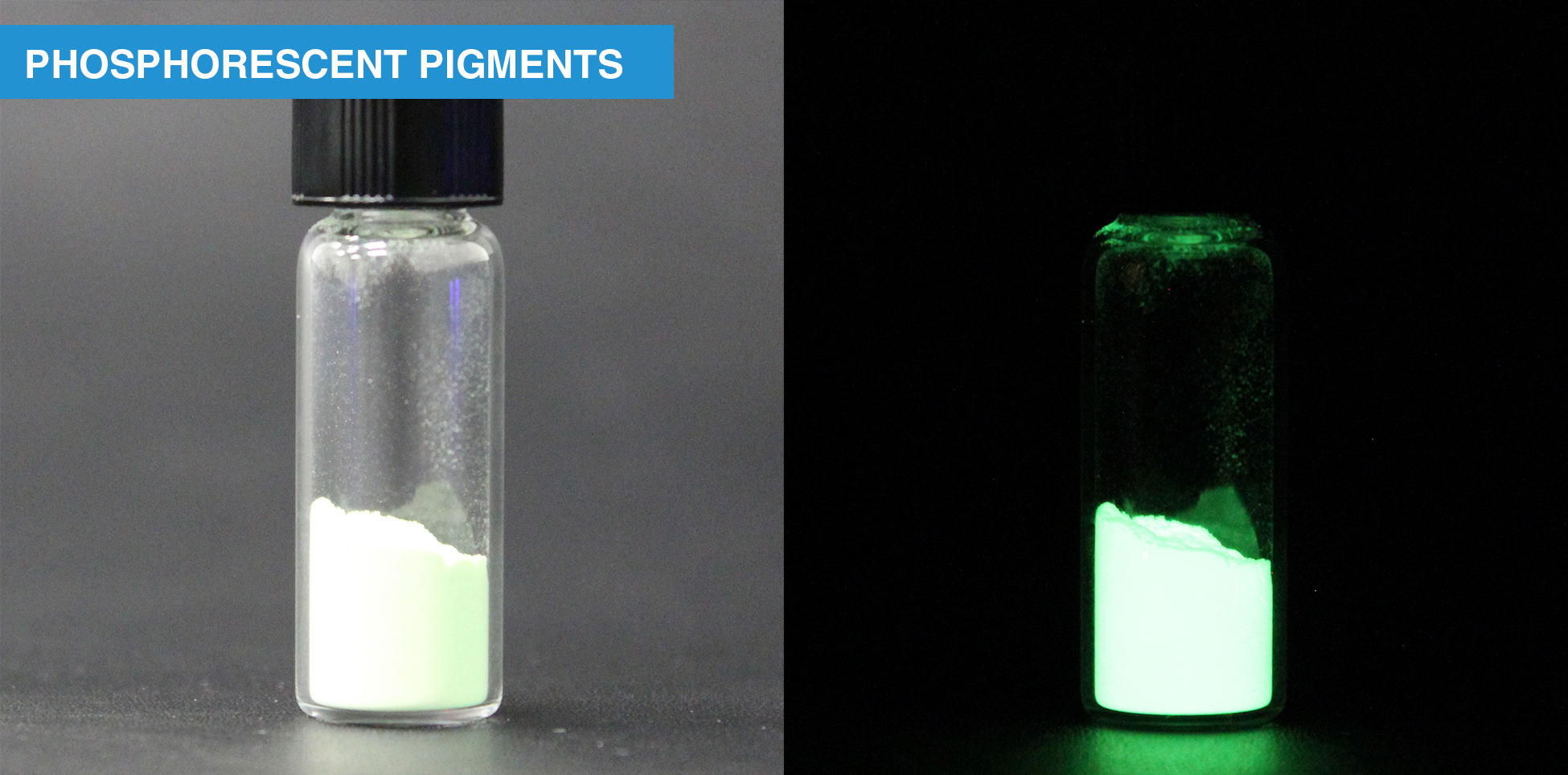
Thermochromic and phosphorescent pigments were introduced into the project. Thermochromic pigments change their color depending on the ambient temperatures present. This serves to absorb or reflect solar energy during different times of the year and different seasons. Cold winter temperatures allow the material composite to darken and absorb more solar heat gain. Hot summer temperatures allow the surface to whiten and reflect the solar heat gain back into its surroundings. The phosphorescent pigments absorb energy from the sun during the day and emit it slowly during night time. They are incorporated to remind users in darkness about the energy conservation of the system.