Design and Project Goals
Our goals for this project were as followed:
- Research and outline a potential for soft robotics in architecture
- Design a soft robot that inflates and deflates to control heat transfer in building skins
- Integrate smart materials and microcontrollers for a dynamic system design
- Create a pneumatic actuator soft to the touch and lightweight
- Create a design for an autonomous soft robotic network
- Fabricate a prototype of a soft robotic element that can be tested
- Analyze the results and weaknesses of our design, prototype and gathered data
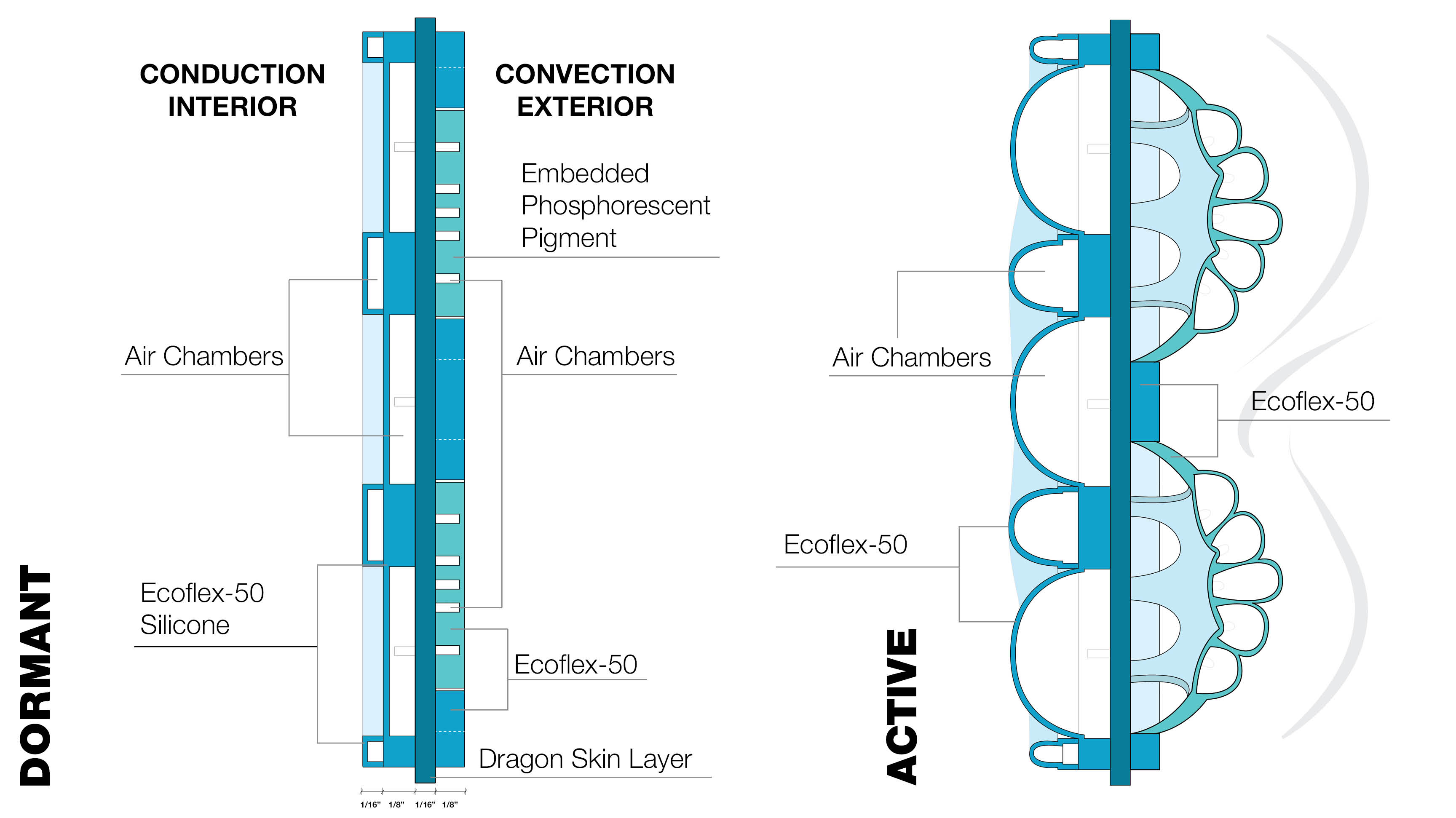
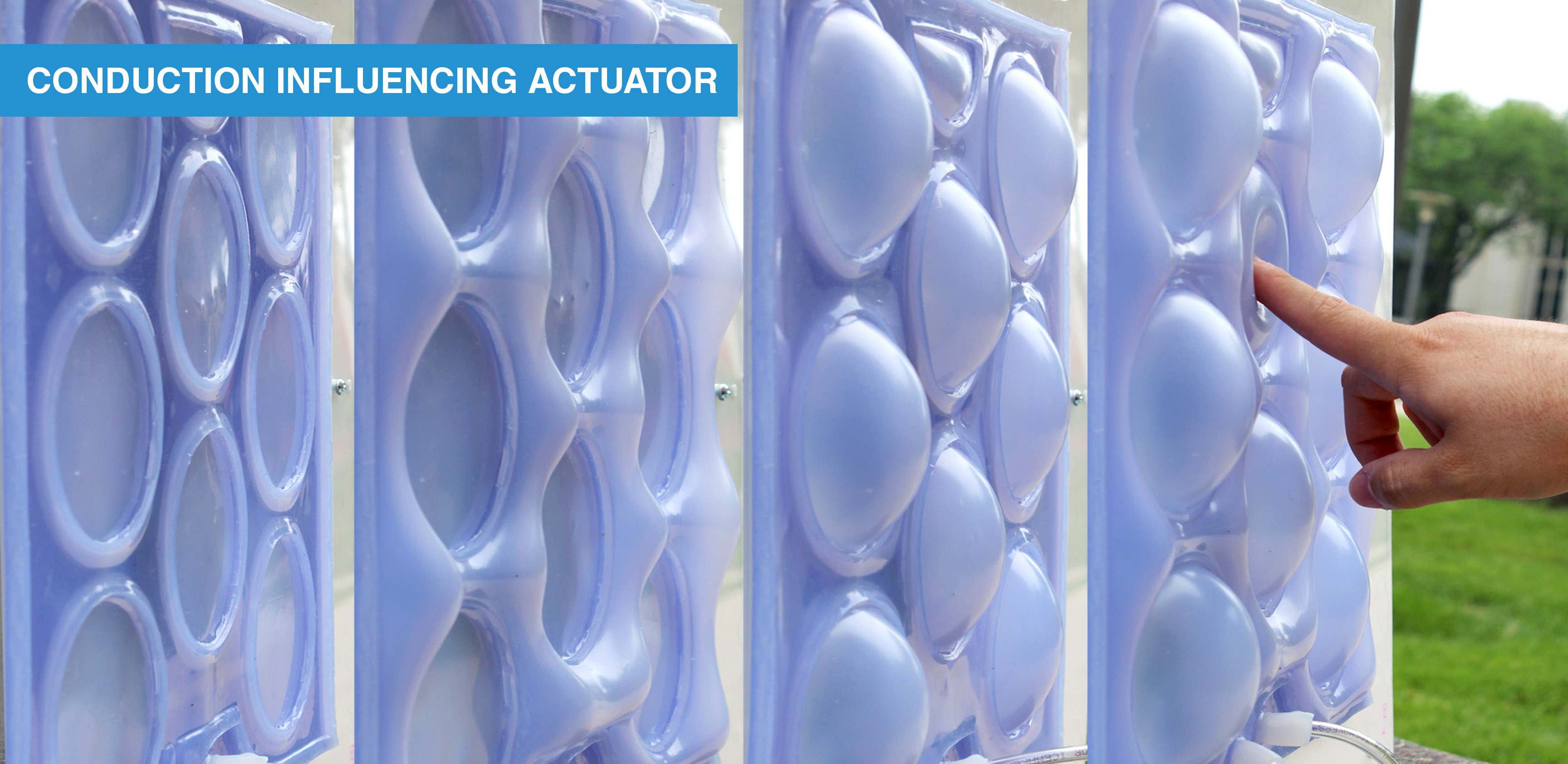
The design of the Soft Barrier incorporates aspects from the PneuNets actuator. Soft Barrier consists of two main types of actuators. One type creates a series of stacked air pockets to control conduction in the design, while the other creates a larger deformation of the robot’s surface to manipulate air turbulence.
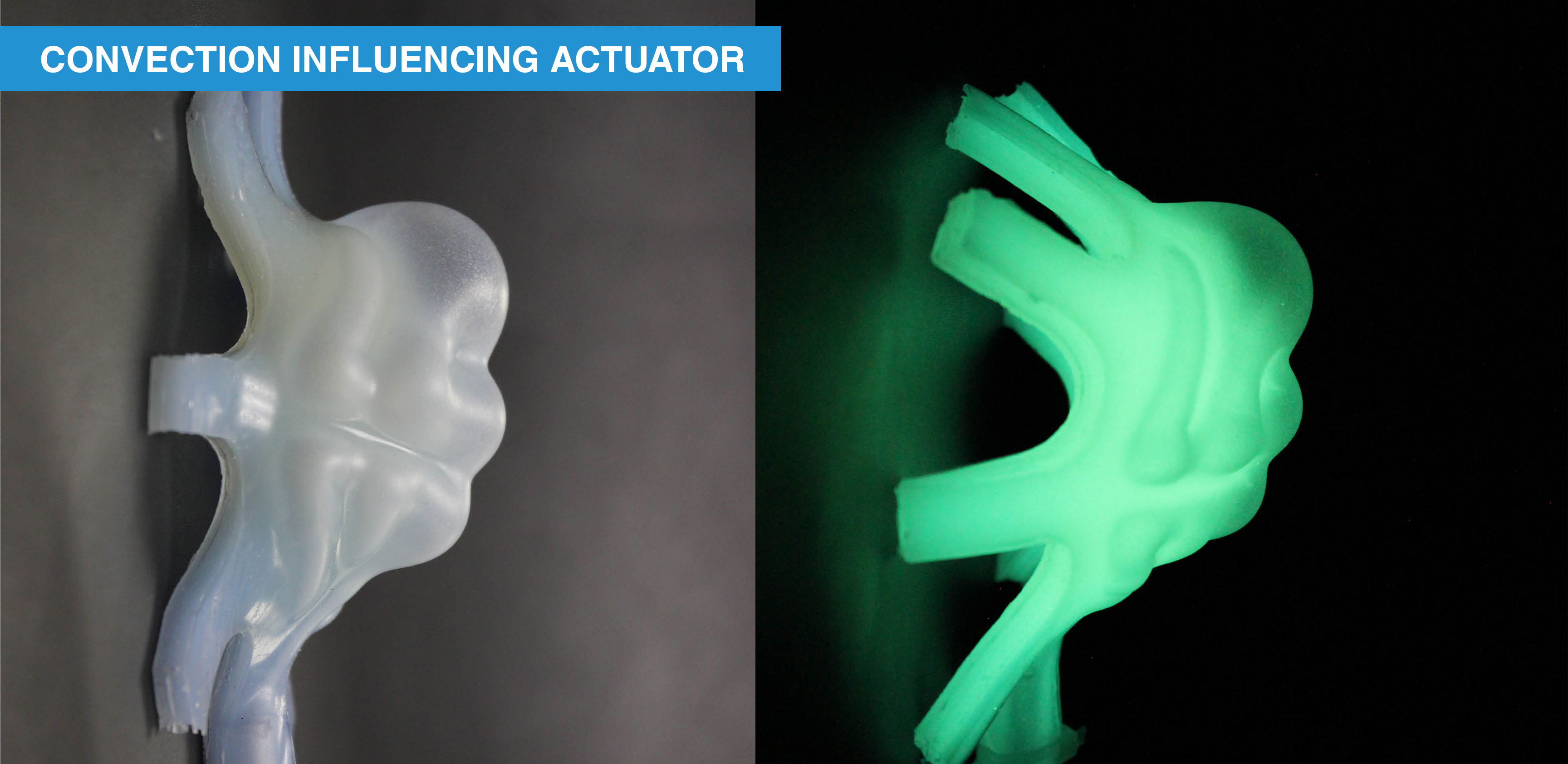
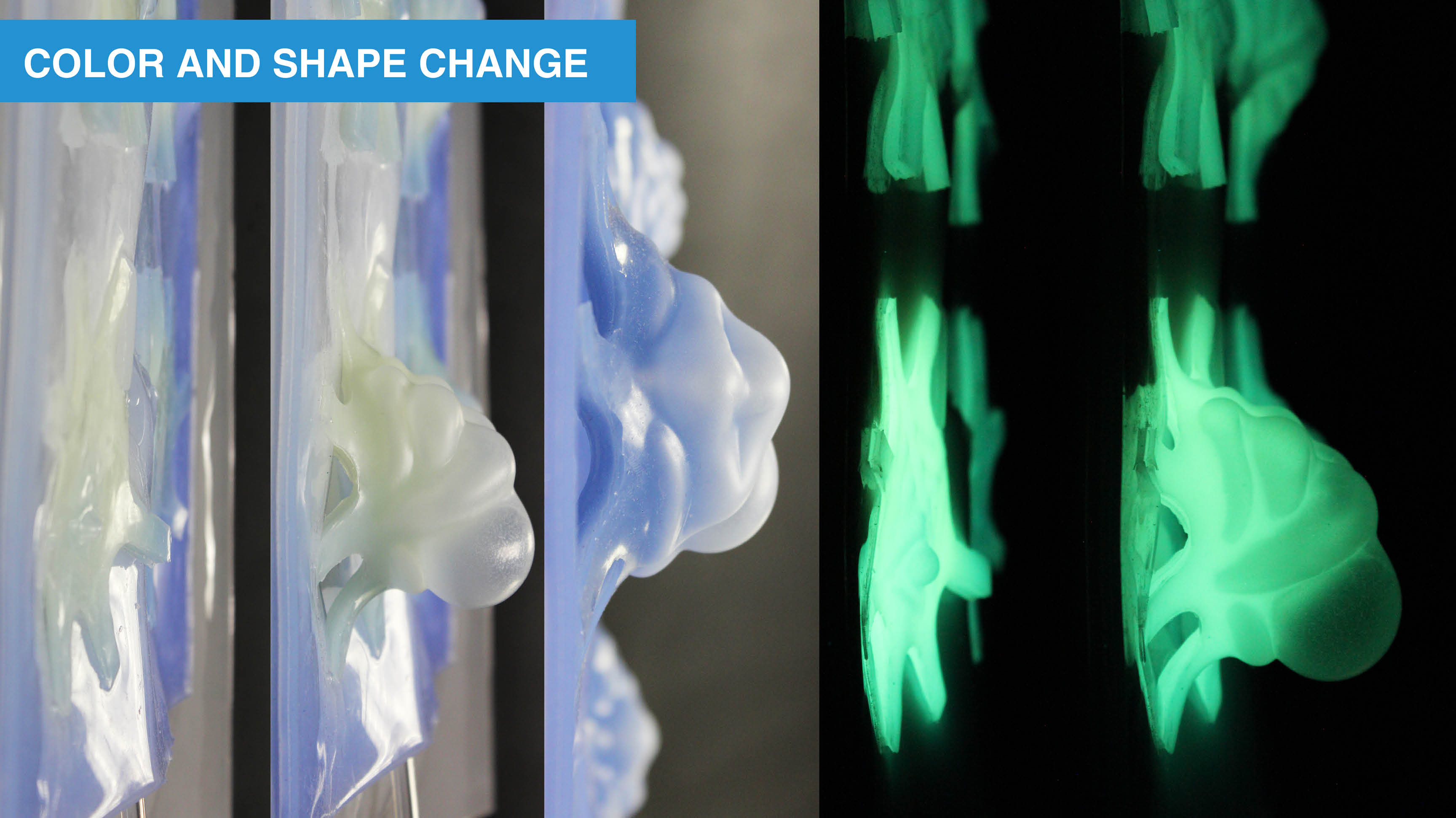
The latter actuator displays great similarities to the PneuNets actuator and uses internal air chambers to create a larger curving deformation. The former actuator uses a flat mold to create an actuator with a nonlinear movement, inflated through a series of incorporated air pockets. Just like the PneuNets actuator, Soft Barrier Robot also uses a number of layers that are adhered together. The major difference between the PneuNets actuator and the Soft Barrier Robot lies in the geometry of the air chambers and hence the final deformation. While the goal of the PneuNets actuator is used to create a bending movement, the Soft Barrier uses the air chamber to inflate without bending but with a very high degree of control over the actual air volume in the system. The design comprises of four layers of silicone. One layer is made with a sturdier silicone (Dragon Skin- 30) to stabilize the entire actuator assembly.