Pump and System Design
Fluid sharing system design
The system consists of a bi-directional rotary pump and a pair of McKibben actuators to control a joint. As shown below, to share the working fluid, a tank can be removed from the system. Two McKibben actuators have complementary movements depending on the flow controlled by the pump. This motion of the two actuators can transform into a rotational motion at the joint. To control the joint precisely, we need to specially design the pump to fit soft robotics applications.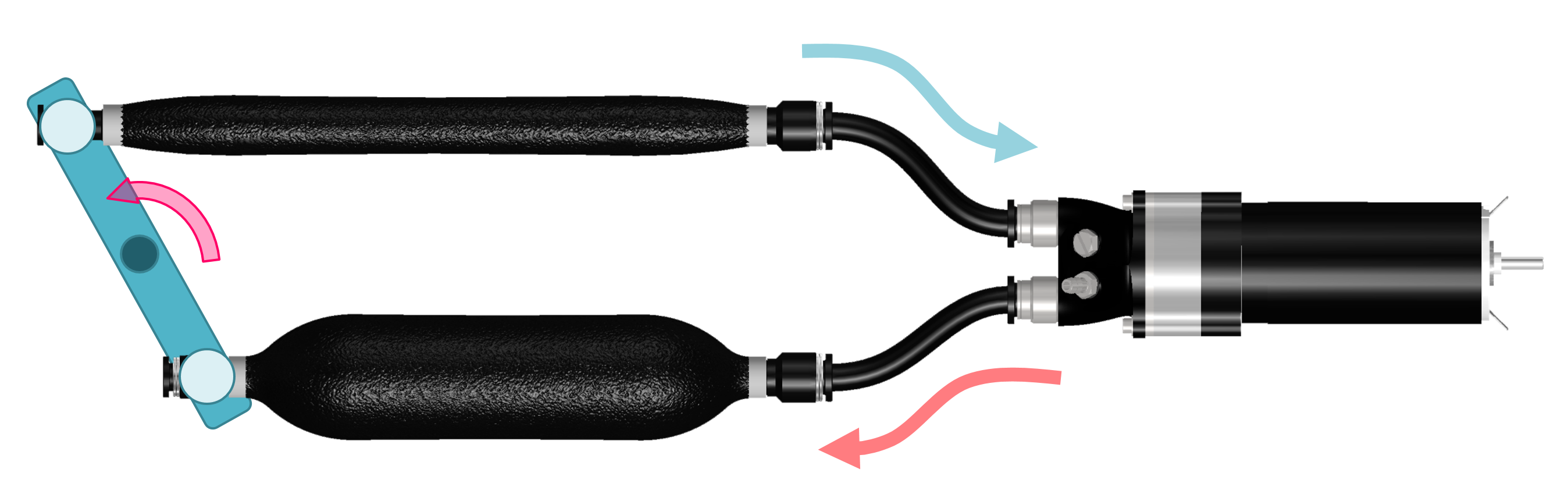
Pump design
The design of the pump is the most important in this project because the performance of the pump decides the performance of the whole actuation system. To control the flow precisely, reducing the internal leaking is required. On the other hand, to reduce gaps between the rotors and casing causes the increasing of the friction between them. In addition, because we use alcohol instead of oil as the working fluid, we cannot expect the lubrication by oil. Moreover, we should consider fabrication methods using affordable materials and parts. At the maximum to reduce the friction without internal leaking, the pump incorporates thin ball bearings and oil-less slide plates.
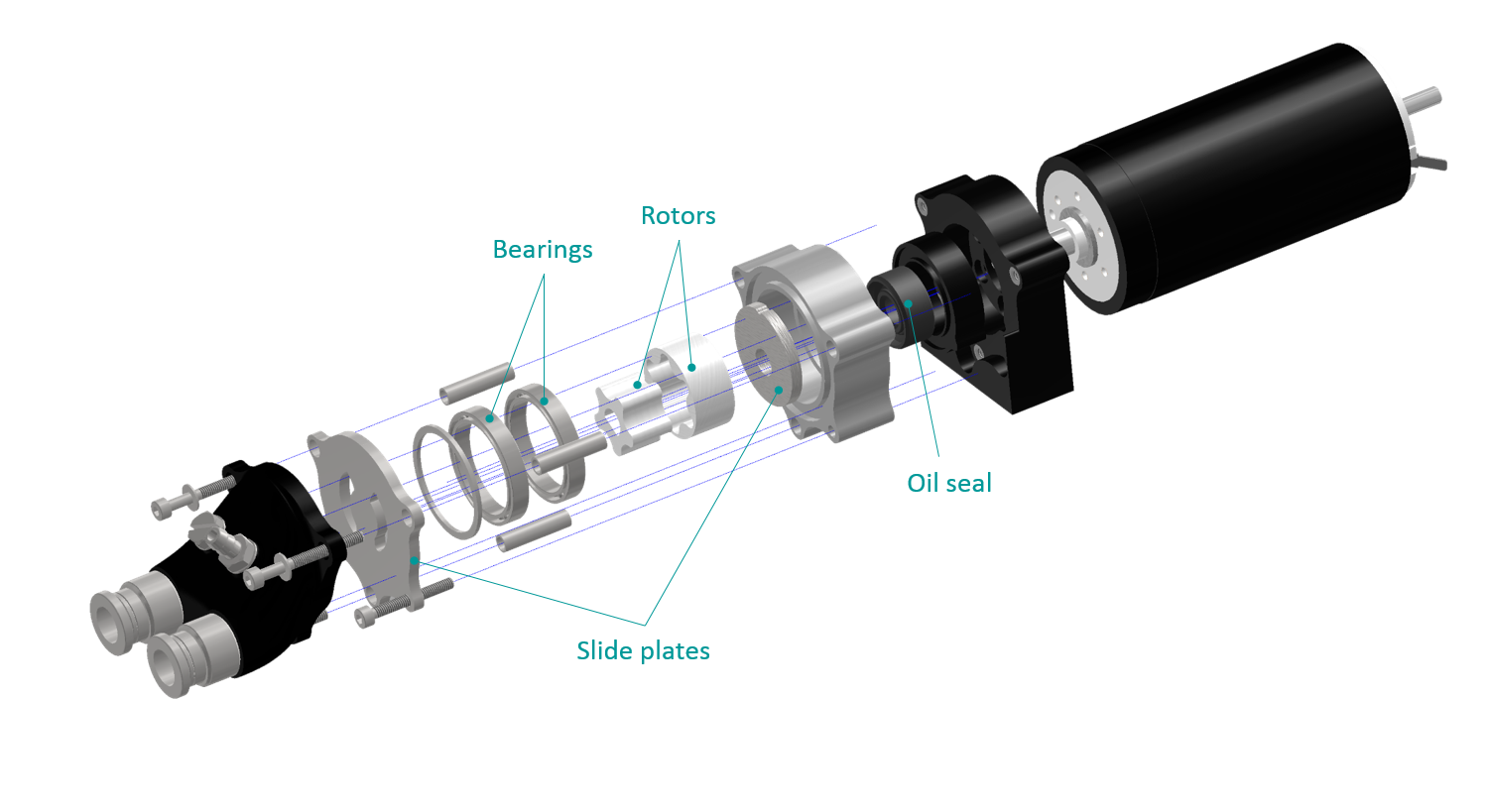
The basic mechanism was the same as usual rotary pumps but the structure was redesigned to make the pump small and easy to fabricate. The pump also incorporates many commercial parts.

You can download .step file of the pump design (Download CAD data).