Data Collection and Output for Pottery
Pottery Instruction
As stated, one of the goals of this project was to help teach students to throw a pot more effectively. In order to do this we observed our ceramics teacher throw a pot. The process is highly complicated, including individual finger and arm motion. In order to begin addressing this problem, we worked with Mr. Raeder to simplify the process of throwing a pot to squeezing the edges of a block of rotating clay with two fingers. We figured that if we can replicate the pressure which the teacher is squeezing the clay and output it to actuators attached to the fingers of students, we would be able more effectively teach students how to throw a pot.
In order to output the pressure to the actuator we had to gather data collected from the teacher throwing a pot. To do that we created a glove with pressure sensors attached the tips of the pointer fingers to read the pressure which the teacher is exerting on the block of clay. Using an arduino control board we created a method we dubbed Active Hand Recording (AHR), in which the the glove, a flex sensor map, is constantly polled at a fixed rate, and the data (the placement of the fingers) from the glove is recorded using the Motion Tracking File/Compressed Motion Tracking File (MCI/CMCI), and the MCI Compression Algorithm (MaRS). The AHR constantly polled data from the glove at a fast and fixed rate meaning that latency and high-level detail were not an issue; however, the AHR system comes at a price.
The Active Hand Recording Analysis
Pros | Cons |
- Allows for high detail levels | - High file sizes depending on quality |
- Less processing power required | - Complex algorithm (MaRS) in processing side code |
- Possible redundancy allows for less data corruption at higher polling speeds | - Bitrate and data flow concerns |
- Higher speeds and more data provides a better insight into the movements. |
The AHR system works through a three-step process.
1. The Arduino poll information from the glove.
2. The values from the glove are sent to the computer.
3. The computer recording-relatively timestamps the data and save it into a MCI file.
All of this happens at a certain rate, which depends on the Serial baud output rate.
The processing of the AHR data using the MaRS algorithm works through a two-step process.
1. Seek the MCI file for value consistencies within a threshold.
- Example: The hand is motionless for half of a second
2. If a consistency is found, shrink it to one 'average' byte and set the timestamp of the motion(s) accordingly.
- Example: 'The motionless hand at 00:05, 00:05.15, 00.05.43, 00.05.62, 00.06' is shrunk to 'the motionless hand at 00:05-00:06.'
Note: The algorithm can take a long time to work depending on the duration of the motion capture and speed of the processor.
From all of this we are able to retrieve a graph of the pressure as it relates to time (in this case frames).
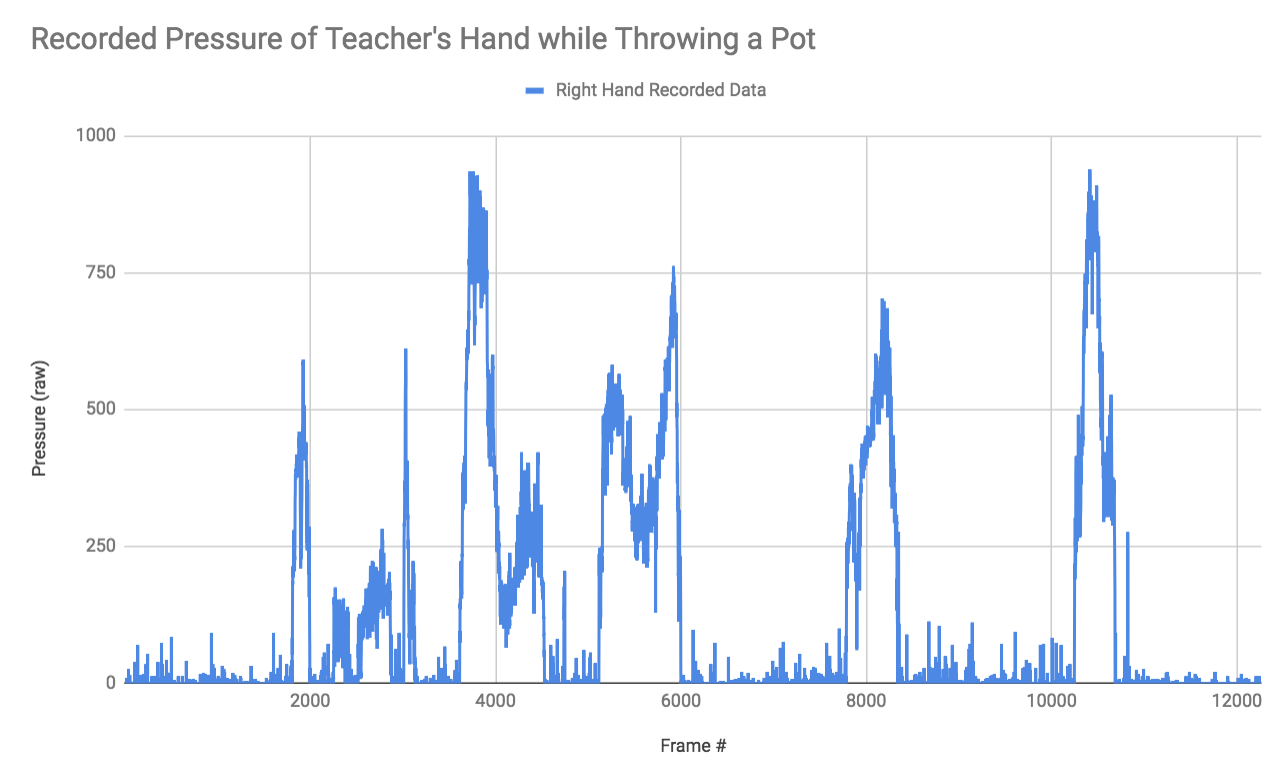
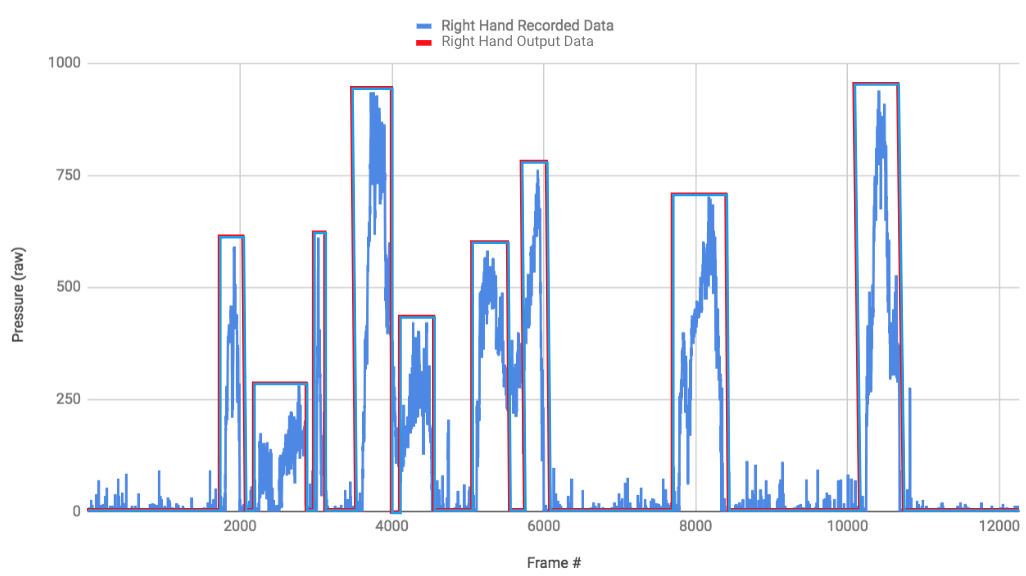
We built a fluidic control board in order to control the output of air to the actuators. However we struggled with understanding how to control the pressure of the actuators using pressure regulators we purchased. This forced us to simplify the process further which was obviously not ideal. We corrected the noise and the input data into a square wave to make for easier control of actuation. We converted the recorded pressure into a scale with the minimum recorded pressure changed to 0.
We only used one hand because there was not enough space in the center of the pots to perform controlled actuation. While recording data, sensors were put on both the right and left hands. We noticed that the force applied the outside edge had a greater impact on the straightness of the pot, as on average the right hand, the outside hand, applied more force to the pot than the inside hand. We could not control for the vertical motion of the student, however we believe that after observation, mimicing the vertical position of the hand was intuitive.


This method proved to be ineffective because we oversimplified the process of throwing a pot. Our largest issue was in controlling the fluidic control board's output of pressure for a long duration of time. We experienced difficulties with keeping the pump continuously working over the duration of throwing the put and thus were unable to actually, accurately test the quality of the MaRS algorithm in teaching novices to throw pots.

If we were given more time we would have liked to moved towards a Passive Hand Recording (PHR) system. PHR is a method in which if the glove moves, the data is recorded, unlike AHR which constantly records hand movements, moving or not.
Pros | Cons |
- Less file size than AHR | - Latency concerns |
- Detail can still be captured | - Incorrect threshold values may cause loss of detail |
- Runs with less data transfer speed required | - False triggering may occur depending on threshold values |
- Less data corruption | - No backup/redundancy |
We however did not manage enough time to fully develop this method.
The code used throughout this entire project can be found here.
