Preliminary Model
The soft robot is a rolling spherical structure, similar to BB-8 (see 1. Background). To induce the rolling motion, we intend to produce lateral displacements of the sphere’s center of mass, thereby causing disturbances in the sphere’s state of neutral equilibrium.
Two diaphragm dielectric elastomer actuators (DEAs) are supported by rigid cylindrical frames and installed within a hollow, rigid sphere. A rigid beam is placed between the diaphragm actuators and a metal mass is attached to the beam using tapes. (see Figures 2.1.1a, 2.1.1b and 2.1.1c)
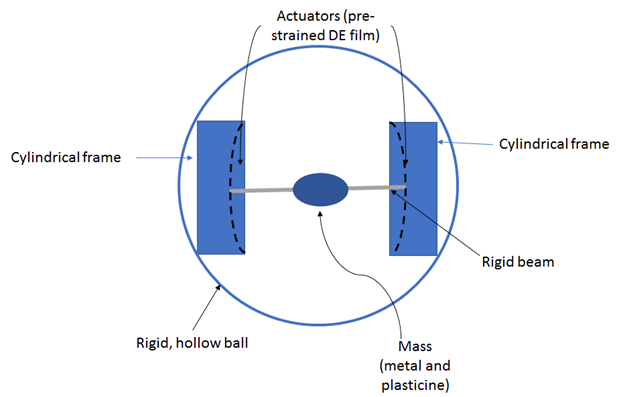
Figure 2.1.1a: Schematic of soft robot at rest
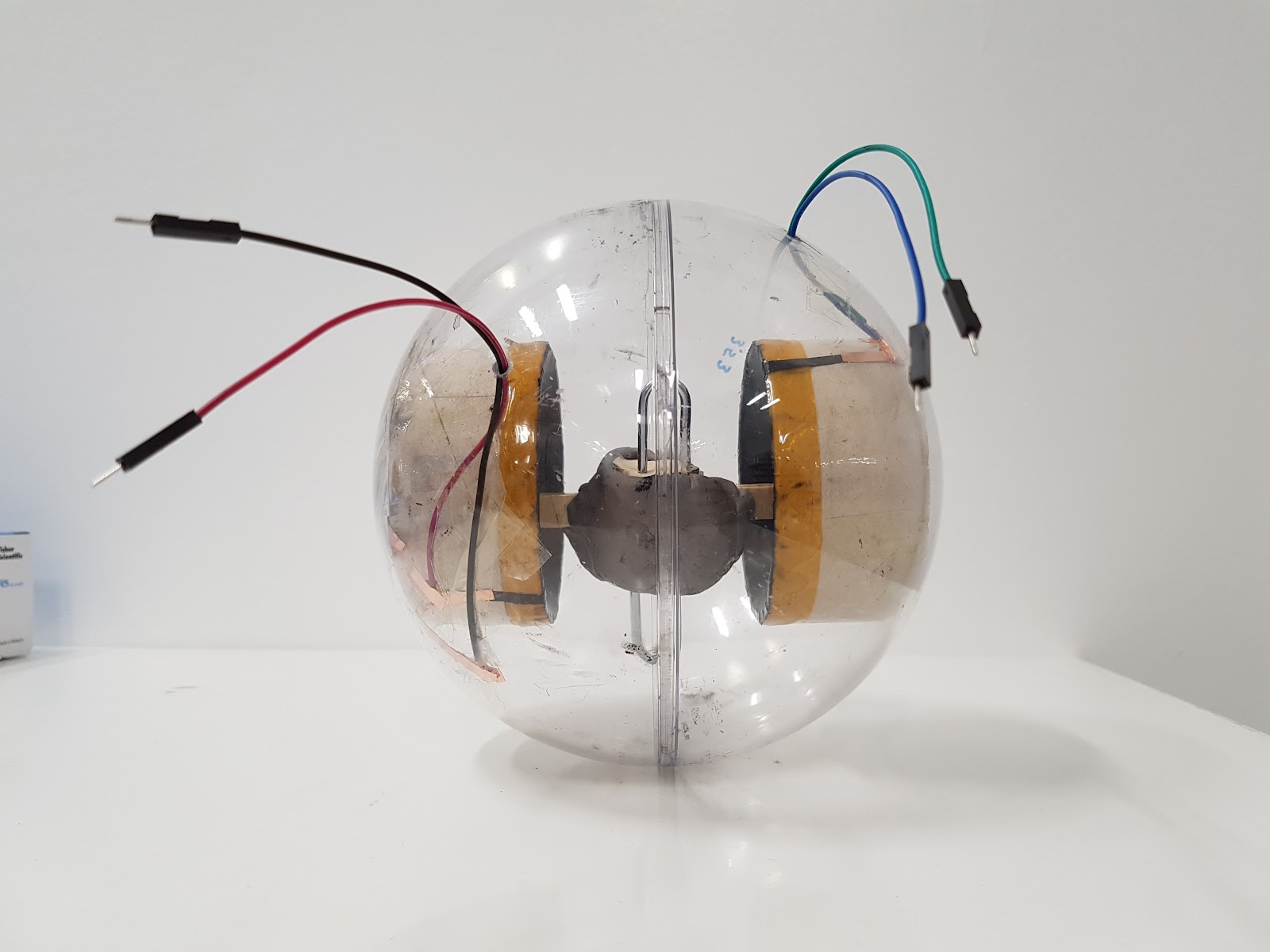
Figure 2.1.1b: Image of prototype at rest (front view)

Figure 2.1.1c: Image of prototype at rest (side view)
When one of the diaphragms is actuated, the film of the actuated diaphragm increases in area and decreases in thickness. Because the rigid beam exerts some tension onto the two originally taut diaphragms, when one of the diaphragms bags slightly from the actuation, the compressive force from the actuated diaphragm on the beam would decrease. However, because the other diaphragm is still taut, there would be an imbalance in the forces exerted on the beam-mass so there would be a net force in the direction of the actuated diaphragm and the whole beam would shift laterally, away from the relatively taut film and towards the looser one. Consequently, the hanging mass would shift as well and the centre of mass of the entire sphere would be displaced. This causes the sphere to roll. (see Figures 2.1.2a and 2.1.2b)
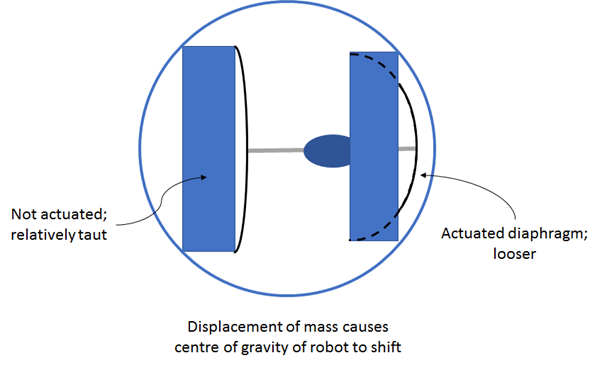
Figure 2.1.2a: Schematic of disturbed soft robot
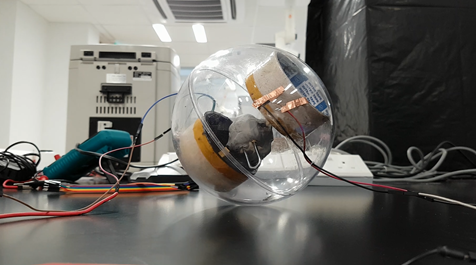
Figure 2.1.2b: Image of disturbed prototype