Design
Why we chose a spherical configuration
A sphere resting on a flat plane is in a state of neutral equilibrium and has the advantage of having unbiased tendency to roll in any direction when disturbed (Gupta, Singhal and Vasishtha, 1991). The state of neutrality also eliminates the need to deal with tripping and getting back up (as is the case with robots that have limbs).
How we intend to make the sphere roll
To induce rolling motion of the sphere, one common way is to exert a force on the sphere's exterior. However, a limitation of this method is that the sphere needs to be in contact with an external actuator that is responsible for the force. If we were to have any additional fixtures upon the exterior of the sphere, we would lose the unbiased freedom of the ball to move in any direction parallel to the surface it is resting on.
Another method is to displace the center of mass of the robot so that the sphere rolls in the direction of displacement. To execute this idea, a movable, heavy and dense mass is suspended in the middle of a hollow sphere. This heavy mass will be attached to an actuator within the sphere to bring about internal displacement of the robot's centre of mass, without altering the spherical exterior of the robot. Whenever the heavy mass is displaced in a particular direction, the center of mass and hence the robot would move in the same direction.
Why we chose to use diaphragm dielectric elastomer actuators (DEAs)
DEA is a suitable mechanism for inducing internal displacement of the heavy mass we intend to suspend in the hollow sphere, as suggested in the previous paragraph, because DEA is lightweight and will not significantly affect the concentration of mass of the robot at the dense mass. Dielectric elastomers (DEs) are electromechanical transducers able to convert electrical input into mechanical energy as manifested in actuation. In order to actuate, the DE film is painted on both sides with compliant electrodes. When voltage is applied, charging of the DE will induce maxwell stress in the film and it will be compressed in the thickness direction. Assuming that the DE film has unchanged volume (Incompressible), there will be planar expansion of the film. (Gu G. Y. et al., 2017)
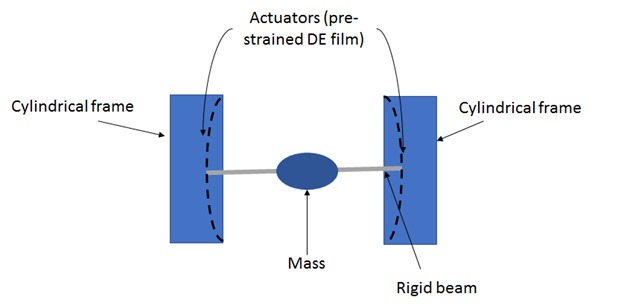
Figure 2.1: Schematic of the internal center-of-mass-displacement system
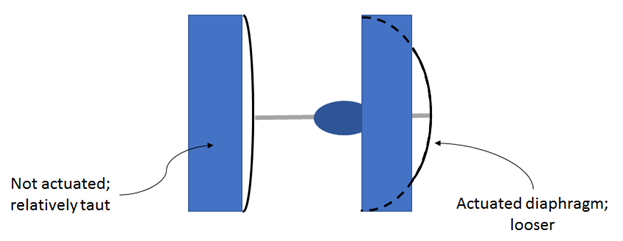
Figure 2.2: Schematic of the heavy mass being displaced
The heavy, dense mass will be suspended at the center of the hollow sphere by means of rigid beams, which will be held in place by 2 diaphragm DEA actuators - the beams will be kept there by the compressive forces exerted by the diaphragms and the diaphragms will be in tension to balance that.
For the diaphragm actuators, DE film will be stretched over a rigid cylindrical film and held in tension because the pre-strained condition enhances the actuation and hence the displacement of the mass (Li B. et al., 2011). Acrylic VHB 4910 is the chosen DE because this material has high dielectric constant, produces good strain and can withstand shear (Adezif.com, 2017; Barnes A. et al., 2007; Plante J. S. and Dubowsky S., 2006).