Potential Modifications
Improve the robot's ability to move in multiple directions
An ideal sphere in a state of neutral equilibrium is equally capable of translating in any direction parallel to the flat plane or surface upon which it rests. To capitalize upon the robot's spherical shape and achieve a greater number of degrees of freedom in translational motion, the metal mass can be suspended by four rigid beams whereby the joints between the beams and the mass are able to rotate such that the motion of the mass can be controlled in 2 directions as shown in Figure 2.4.1.
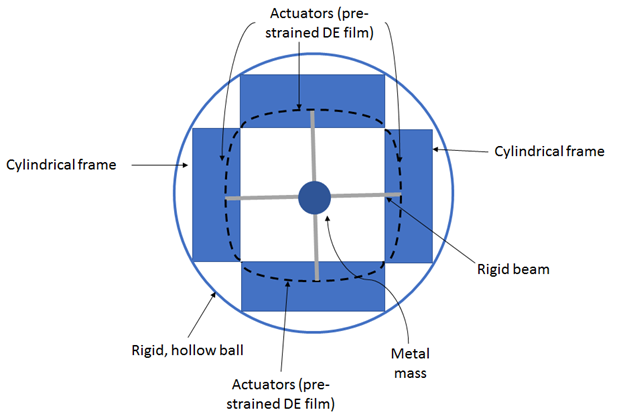
Figure 2.4.1: Schematic of the modified soft robot at rest
Actuation of one diaphragm will cause the sphere to move in that particular direction. Thus, the modified robot is now equipped with 2 translational degrees of freedom and can move forwards, backwards, left, right, and diagonally.
Figure 2.4.2 depicts 2 diaphragms in the modified robot being actuated at the same time, enabling the robot to move diagonally (a combination of forwards and sideways).
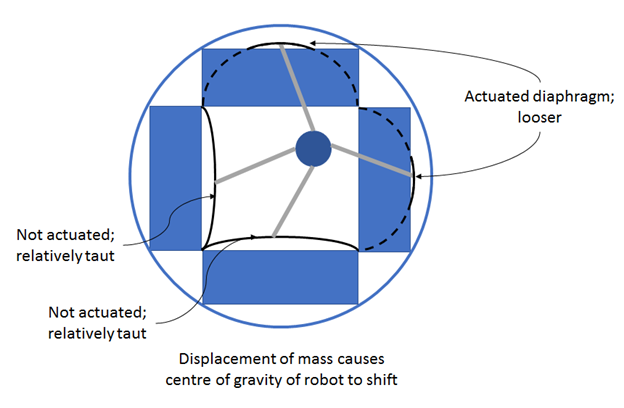
Figure 2.4.2: Schematic of the modified soft robot when being disturbed
Compactibility
External electrical circuitry can be modified to fit into the sphere and will be concentrated at the center of mass of the robot.