Strengths and Weaknesses
Strengths
- Since the individual components of the device are independent of one another, if one component is damaged, the rest of the device is still functional and only that one component needs to be repaired or replaced. For example, if one of the diaphragm actuators ruptures, only that actuator needs replacement but the other actuator and the rest of the sphere and electrical circuitry outside of the sphere can still be used.
- As the robot is spherical, it is, ideally, possible to design a robot that is able to roll along multiple directions by our proposed mechanism (after some modifications).
Weaknesses
- In-plane deformation of a diaphragm actuator results in corresponding out-of-plane displacement of the rigid beam connected to the actuator. This means that a pair of diaphragm actuators is associated with one direction of displacement of the robot's center of mass. Hence, the number of degrees of freedom of the robot's motion is limited by the number of pairs of diaphragm actuators installed in the hollow sphere.
- For our current prototype, the power supply and circuitry for electrical input are outside of the sphere and connected to the actuator by means of wires that go through holes drilled into the sphere. Having wires emerging from the sphere would impede the motion of the robot. (see Figure 2.3.1)
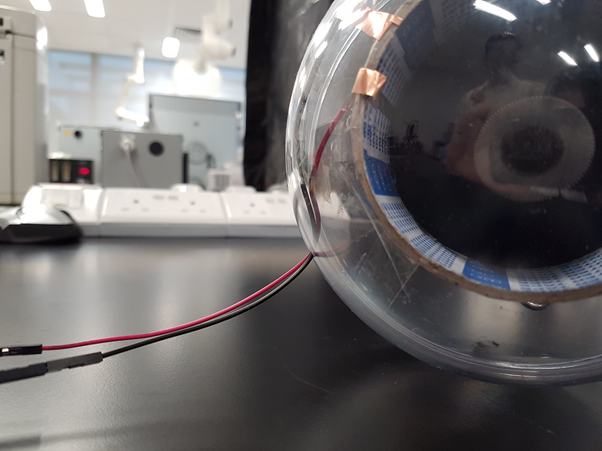
Figure 2.3.1: External wiring gets in the way of motion