Self-healing materials in soft robotics

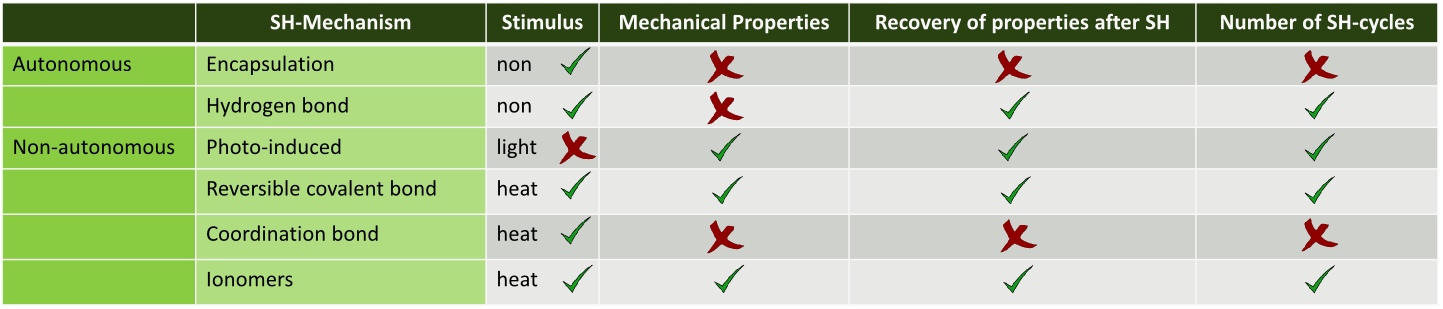
Although a wide range of SH-polymers has been developed over the last years, only few have properties that comply with the specific requirements for soft pneumatic robotics. This was concluded from an analysis (table) which was conducted on the SH-mechanisms, presented in figure.
From this analysis, the DA- SH-polymers were chosen for the construction of the first SH-SPA. The SH-process of these non-autonomous DA-polymers requires a heat stimulus and is based on reversible covalent bonds. One of the reasons why the DA-polymers were chosen is because the mechanical properties of these polymers are almost completely recovered after healing, which means that the number of SH-cycles for a polymer part is not limited by the SH-mechanism. This is not the case for SH-mechanisms using coordination bonds or encapsulation mechanisms. In case of an encapsulated system the healing action can only take place a limited number of times at the same damage location: once the capsules are broken the healing agent is no longer present at that specific location, which strongly limits the number of damage-healing cycles.
A second advantage of the DA-polymers are the strong reversible bonds the network consists of. Due to these, the polymers have a relatively high ultimate tensile strength, as required for SPA-applications. The SH-process of both coordination bond and mechanochemical mechanisms, on the other hand, is based on weak non-covalent interactions, such as hydrogen bonds or weak metal-amine bonds, limiting the mechanical properties of these polymers.
Similar to the DA-polymers, SH-ionomers, in which the SH-process also requires a heat stimulus, show a good recovery of the initial mechanical properties after healing, as well as adequate mechanical properties. However, the DA-polymers were selected because their SH-can take place at temperatures as low as 70 °C, which is clearly lower than the required temperature for the SH-process of the ionomers, which is 110 °C or higher.
The photo-induced healing of polymers requires a light stimulus with a specific frequency and of sufficient intensity. The network of these polymers is built up by cross-links based on photo-reversible bonds. These covalent cross-links provide adequate mechanical properties, comparable to the reversible DA-cross- links. Due to the limited penetration depth of the light, the SH-process can only occur in relatively thin polymer pieces (1–2 mm), which might be deep enough for some soft pneumatic robotics appliactions. As currently intense UV-light is needed to heal these polymers, these photo-induced polymers are not used in this research work. Nevertheless photo-induced SH-polymers have potential to be used in future Soft Robotics applications.