Case Study
The presented manipulator can found application in different fields like manipulation, retraction, exploration or surgery. In this section a medical application of the manipulator is shown.
Current procedures in Minimally Invasive Surgery, such as laparoscopy, single port laparoscopy and natural orifices translumenal endoscopic surgery, are performed with rigid or semi-rigid tools [Vyas et al.]. Soft technologies allow to design manipulators with high dexterity [Laschi et al.] which are able to move inside the body with high compliance and safety, reaching different districts of the body, by controlling their stiffness during the interaction with tissues.
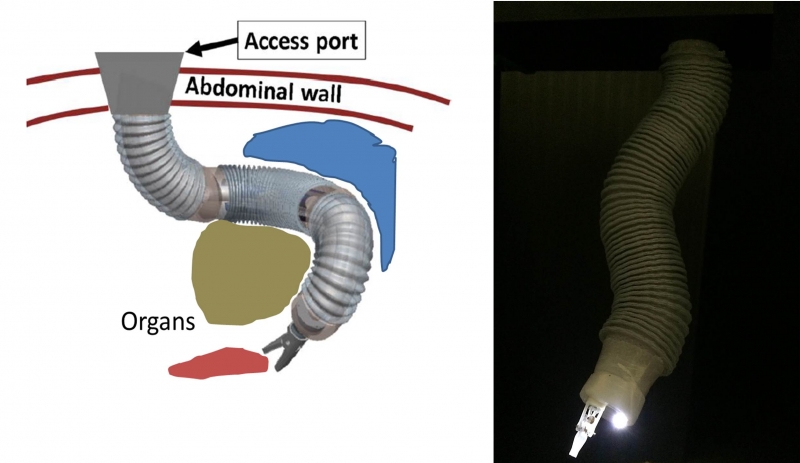
The soft manipulator is suitable for abdominal procedure in which the arm is inserted in the abdominal wall from an access port. In order to make the arm functional in a working scenario, the tip of the manipulator has been equipped with a custom gripper and a miniaturized camera which are two fundamental elements for operating.
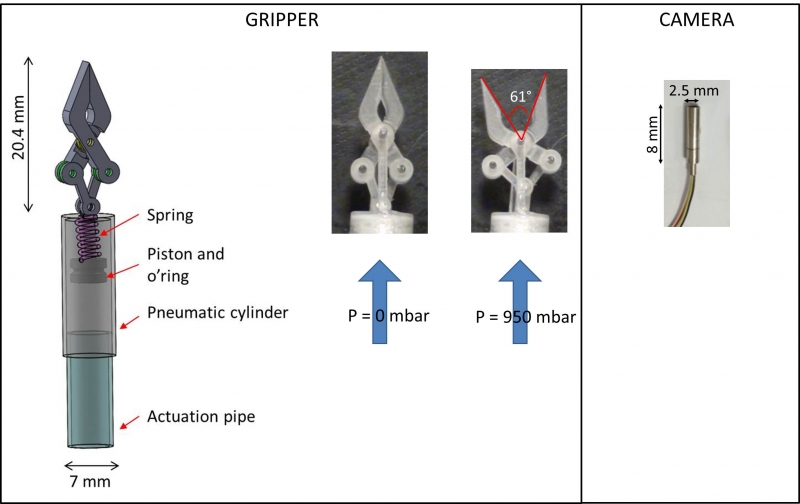
The pneumatic gripper has been designed for this specific application. It is normally closed and it opens when the pressure is supplied. The maximum pressure for opening the gripper is 950 mbar which corresponds to 61 degrees opening. The commercial camera has white leds integrated, a resolution of 640x480 pixel and a framerate of 30 fps (frame per second).
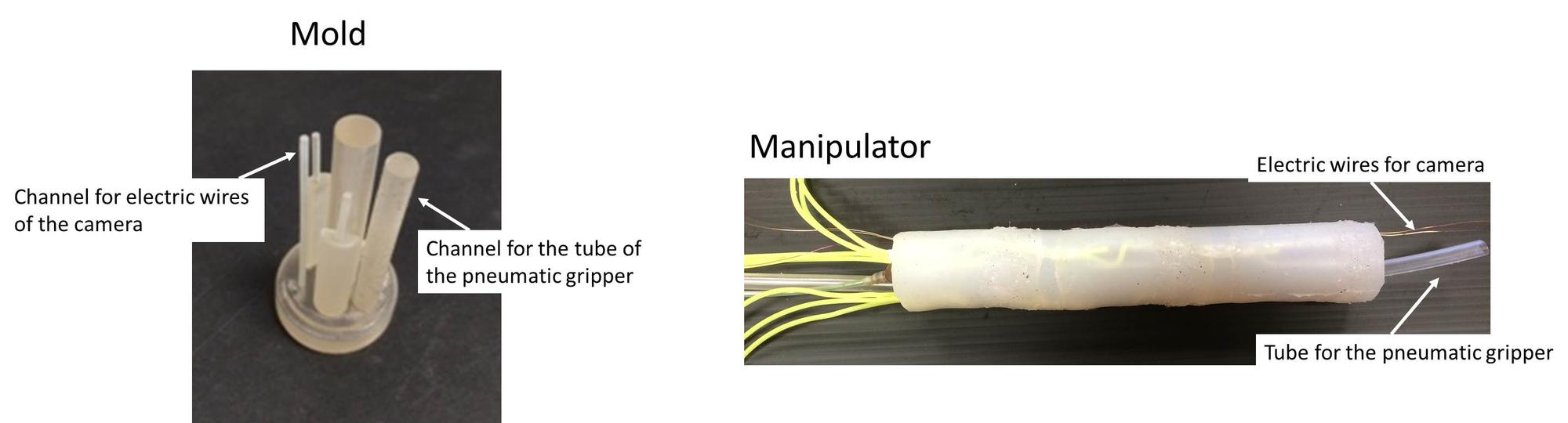
The design of the inteegrated manipulator is the same presented in the previous sections, but it includes two channels more for housing one pneumatic tube for actuating the gripper and electric wires for the camera supply.
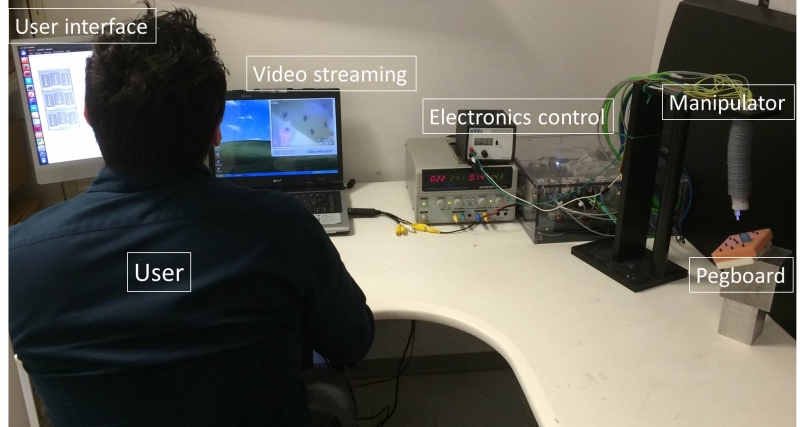
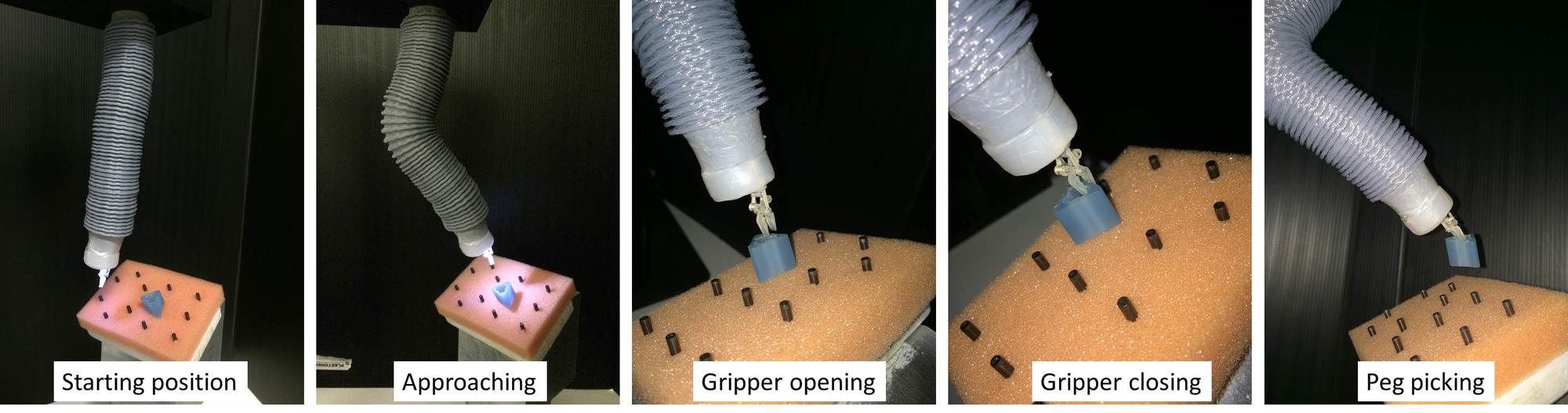
In order to test the functionality of the manipulator, pick and place tests have been performed. The user is sat in a remote control station in which the video acquired from the on-board camera is displayed. Looking at the video streaming, the user can move the manipulator controlling it with a joystick and a dedicated user interface.
The task consists in picking the peg from one position of the pegboard and place the grasped peg in a different assigned position of the pegboard.
The following pictures and movie show the set-up and the pick and place task.
Future works will focus on an optimized control of the manipulator in order to improve the accuracy of the motion reducing the tremor visible in the video. In addition, the miniaturization of the arm will be implemented. Preliminary prototypes show the possibility to reduce the diameter of the manipulator up to 14 mm which corresponds to a feasible value for surgery instrumentation. Further study on the stiffness possibilities for the soft manipulator will be conducted taking into account other technologies like fiber jamming and layer jamming. Some materials will be changed in order to meet more stringent biocompatibility requirements.
Contributors
Iris De Falco
Bibliography
Cianchetti et al. (2013) STIFF-FLOP Surgical Manipulator: mechanical design and experimental characterization of the single module.
De Falco et al. (2014) A soft and controllable stiffness manipulator for minimally invasive surgery: preliminary characterization of the modular design.
De Falco et al. (2014) STIFF-FLOP surgical manipulator: design and preliminary motion evaluation.
De Falco et al. (2015) Design and fabrication of an elastomeric unit for soft modular robots in minimally invasive surgery.
Ranzani et al. (2013) A modular soft manipulator with variable stiffness.
Elsayed et al. (2014) Finite Element Analysis and Design Optimization of a Pneumatically Actuating Silicone Module for Robotic Surgery Applications.
L. Vyas et al. (2011) Flexible Robotics.
Laschi et al. (2014) Soft Robotics: new perspectives for robot bodyware and control.
Cheng et al. (2012) Design and Analysis of a Robust, Low-cost, Highly Articulated Manipulator Enabled by Jamming of Granular Media.
Allen et al. (2014) Robotic Granular Jamming: Does the Membrane Matter?