Testing
This section describes some tests which have been carried out to characterize the soft manipulator. The motion range of the manipulator has been analyzed and the experimental stiffness has been compared with the theoretical one shown in Modeling Section.
Motion Evaluation
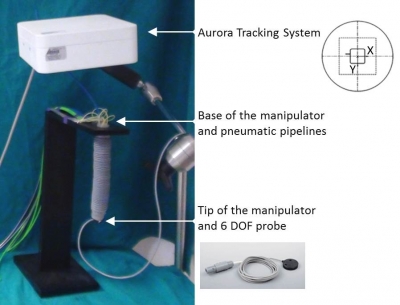
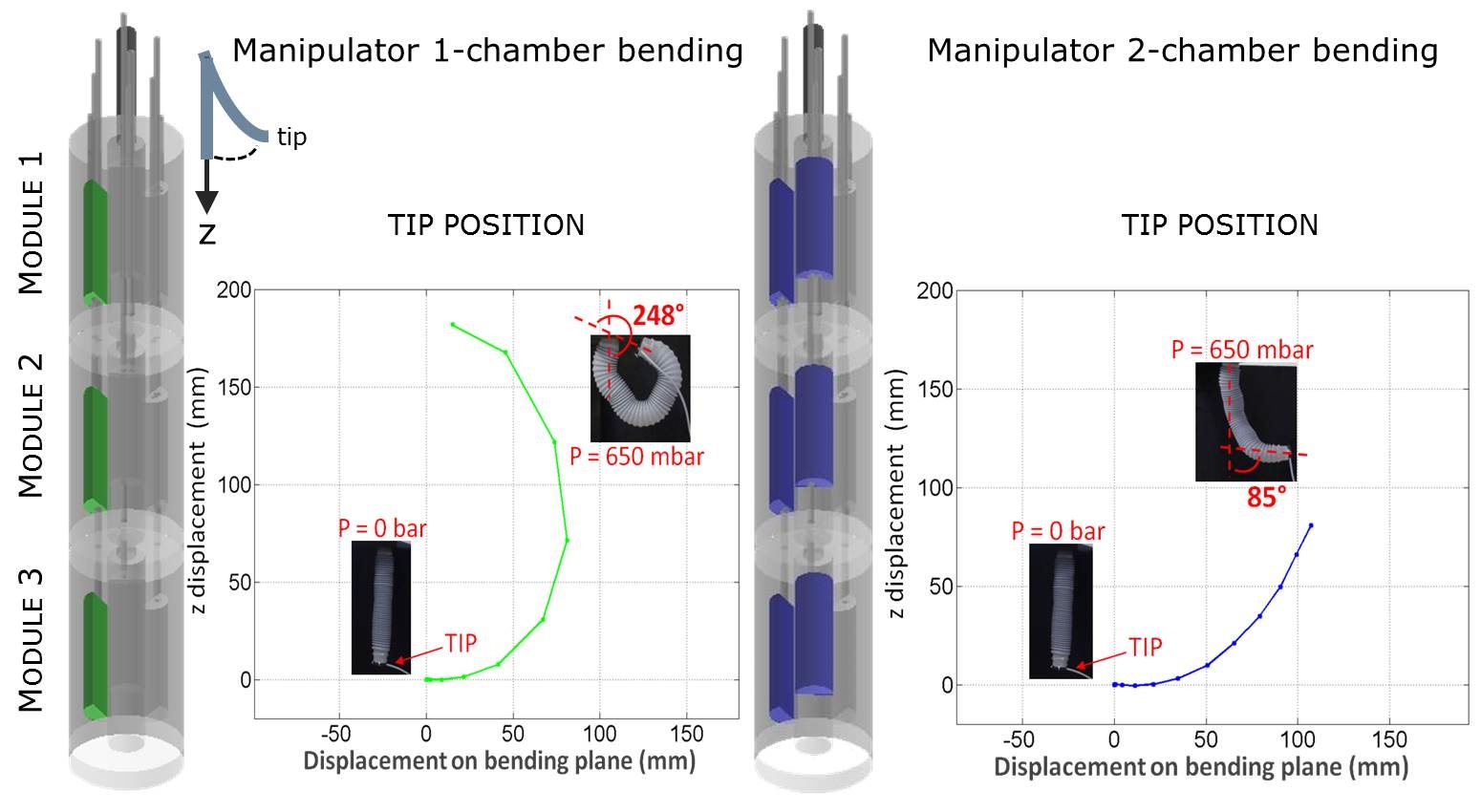
In De Falco et al., a motion evaluation of the manipulator is reported. A 6 degrees of freedom tracking probe has been fixed on the tip of the arm and the different positions during the motion have been acquired with the Aurora EM tracking system.
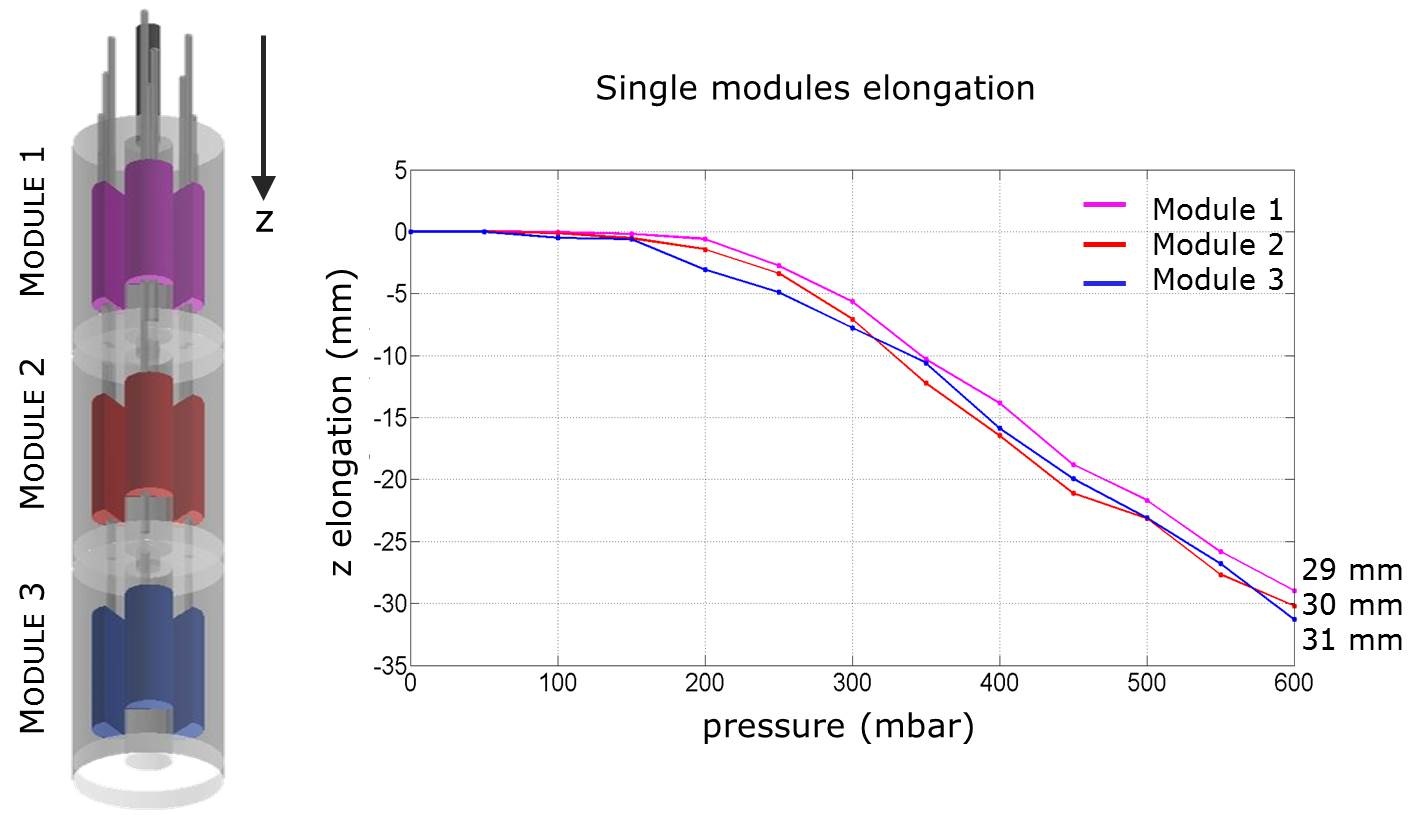
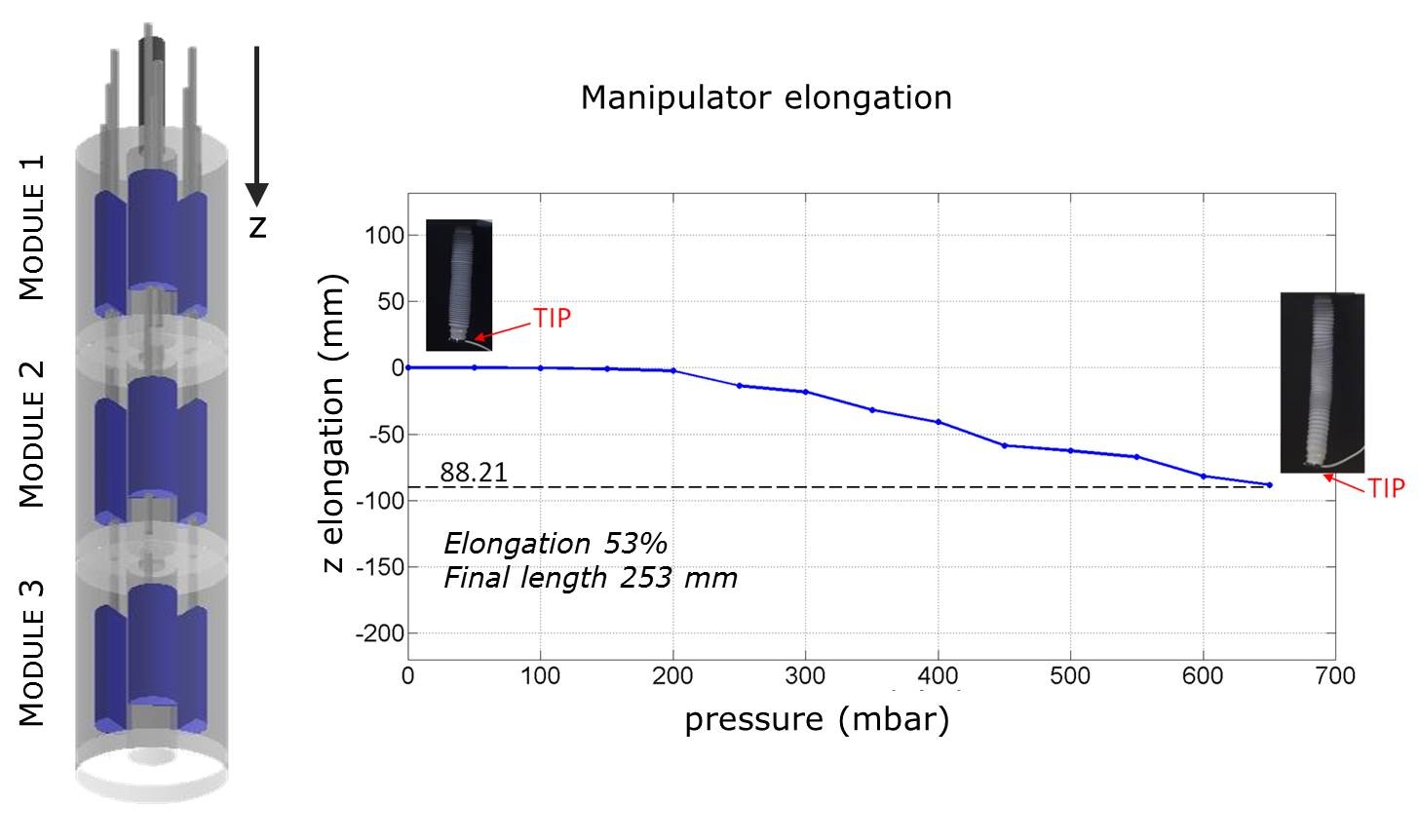
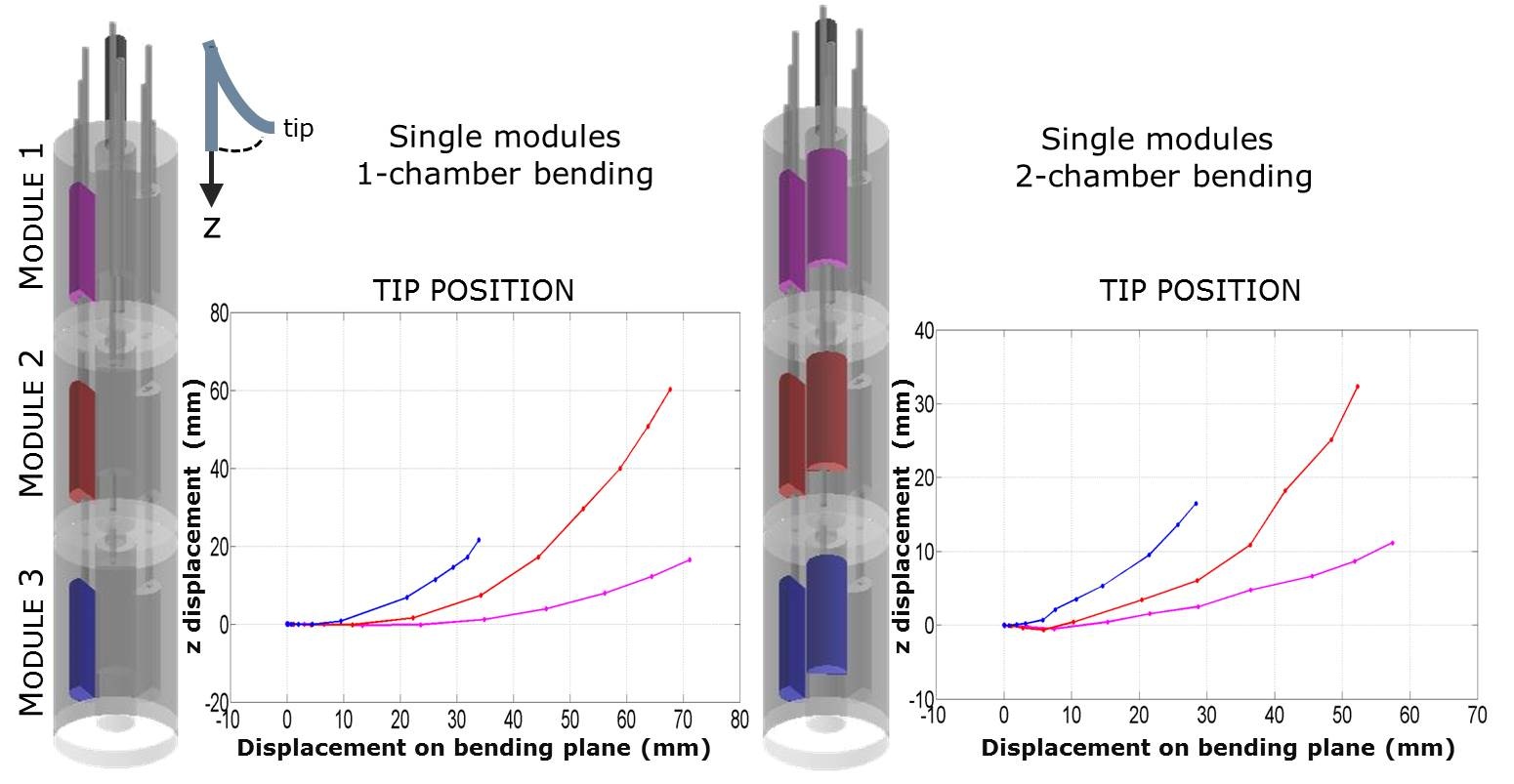
The following figures show how the manipulator elongates and bends when different actuation chambers are actuated with the pressure range of 0 – 650 mbar. The colour of the curves corresponds to the actuation of the same coloured chambers.
Stiffness Characterization
As reported in De Falco et al., the manipulator stiffness has been experimentally evaluated for a 10% compression in axial direction. The Young's Module of the manipulator has been derived from standard compression tests (with a tensile-compression machine) carried out the following working conditions (the same considered for the theoretical evaluation shown in Modeling Section):
- actOFF, vacOFF: chambers are not actuated, granular jamming is not activated;
- actON, vac OFF: all 9 chambers are actuated with the same pressure (650 mbar), granular jamming is not activated;
- actOFF, vacON: chambers are not actuated, granular jamming is simultaneously activated in all 3 modules (980 mbar vacuum pressure);
- actON, vacON: all 9 chambers are actuated with the same pressure (650 mbar), granular jamming is simultaneously activated in all 3 modules (980 mbar vacuum pressure).
Below the experimental set-up, the results and the comparison with the theoretical evaluation are reported.
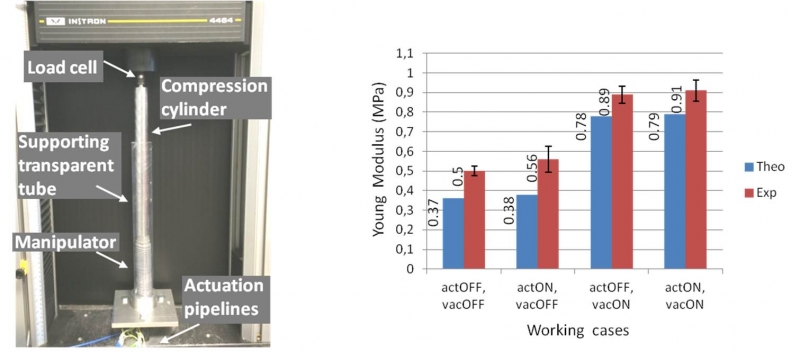
As shown, the stiffness is mainly influenced by the vacuum actuation. Theoretical results underestimate experimental ones of about 0.13 MPa, probably due to the presence of the tubes and sheath not considered in the model illustrated in Modeling Section.
Contributors
Iris De Falco
Bibliography
Cianchetti et al. (2013) STIFF-FLOP Surgical Manipulator: mechanical design and experimental characterization of the single module.
De Falco et al. (2014) A soft and controllable stiffness manipulator for minimally invasive surgery: preliminary characterization of the modular design.
De Falco et al. (2014) STIFF-FLOP surgical manipulator: design and preliminary motion evaluation.
De Falco et al. (2015) Design and fabrication of an elastomeric unit for soft modular robots in minimally invasive surgery.
Ranzani et al. (2013) A modular soft manipulator with variable stiffness.
Elsayed et al. (2014) Finite Element Analysis and Design Optimization of a Pneumatically Actuating Silicone Module for Robotic Surgery Applications.
L. Vyas et al. (2011) Flexible Robotics.
Laschi et al. (2014) Soft Robotics: new perspectives for robot bodyware and control.
Cheng et al. (2012) Design and Analysis of a Robust, Low-cost, Highly Articulated Manipulator Enabled by Jamming of Granular Media.
Allen et al. (2014) Robotic Granular Jamming: Does the Membrane Matter?