Manipulator Assembly
Now you have all elements for mounting the manipulator:
- 3 granular jamming membranes in-series connected and inserted inside three modules;
- One crimped braided sheath.
The mounting process for obtaining one manipulator consists of three main phases:
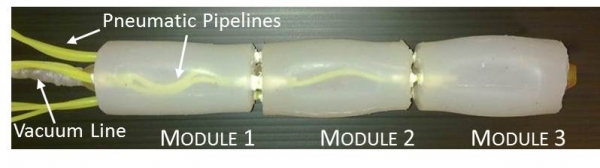
Phase 1. Connection by tubes. Climp the tubes of Module 3 with tweezers and insert (forcing) them inside the actuation chambers of Module 2. Fix the tubes on the top of Module 2 with silicone glue. Insert new tubes inside the base of Module 2 and fix together with the tubes coming out from the chambers of Module 2. Do the same for Module 1. It is very important that the tubes inside the chambers are longer than the chambers (see the figure), so that their function is guaranteed during the motion of the modules.
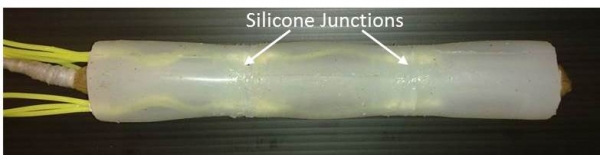
Phase 2. Silicone junctions. In order to connect the modules, pour Dragon Skin 10 between modules using one semi ring mold with 25 mm diameter. Put the semi ring around the modules and pour the silicone from one side. Repeat from the opposite side. The distance between modules is 5 mm. The junction is not actuated and it does not include the granular jamming based stiffening channel. It has been designed in order to minimize its non-active effect on the system performance and not to prevail on that. For this reason we use a stiffer silicone and we tried to minimize the space between modules.
Phase 3. Integration of external braided sheath. Slide the crimped sheath around the manipulator. For fixing the sheath on the top side of the manipulator, close the rings around the top and push 2 crimps of the sheath inside. Pour 2 g of Ecoflex 0050 into the rings. Wait until the silicone is dried and repeat the same phase for the bottom side.

This integration strategy permits to have free space in the manipulator usable for the integration of other tools like sensors, camera or gripper. However, this technology is limited to the integration of 3 - 4 modules. This is due to the tubes that pass inside the actuation chambers. A future optimized solution could be based on a modular approach in which miniaturized valves are on-board integrated at the base of each module, limiting the number of the actuation tubes inside the manipulator.
Contributors
Iris De Falco
Bibliography
Cianchetti et al. (2013) STIFF-FLOP Surgical Manipulator: mechanical design and experimental characterization of the single module.
De Falco et al. (2014) A soft and controllable stiffness manipulator for minimally invasive surgery: preliminary characterization of the modular design.
De Falco et al. (2014) STIFF-FLOP surgical manipulator: design and preliminary motion evaluation.
De Falco et al. (2015) Design and fabrication of an elastomeric unit for soft modular robots in minimally invasive surgery.
Ranzani et al. (2013) A modular soft manipulator with variable stiffness.
Elsayed et al. (2014) Finite Element Analysis and Design Optimization of a Pneumatically Actuating Silicone Module for Robotic Surgery Applications.
L. Vyas et al. (2011) Flexible Robotics.
Laschi et al. (2014) Soft Robotics: new perspectives for robot bodyware and control.
Cheng et al. (2012) Design and Analysis of a Robust, Low-cost, Highly Articulated Manipulator Enabled by Jamming of Granular Media.
Allen et al. (2014) Robotic Granular Jamming: Does the Membrane Matter?