Design
Manipulator architecture
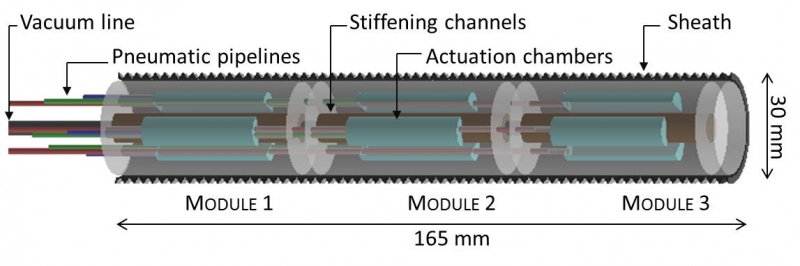
The manipulator is 165 mm in length and 30 mm in diameter.
It is composed of three modules (Module 1, 2, 3) having a length of 50 mm. The distance between two modules is 5 mm. An external braided sheath is integrated along the modules in order to improve the motion capabilities.

The modules have been connected by means of silicon pipelines (outer diameter = 1.5 mm) passing through the actuation chambers. A total of nine tubes are housed in the manipulator: three for each module. They supply the pressure inside the actuation chambers thus the modules move. These tubes are made of soft silicone which allows easy integration and maintains flexibility during motion.
Actuation System
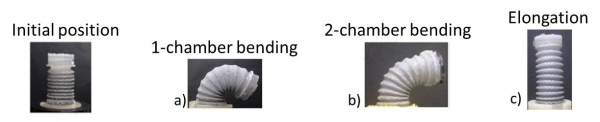
Each module is actuated by three embedded fluid chambers (actuation chambers), in which the air is supplied by pneumatic pipelines connected to external air valves. The possible movements of one single module are the following:
a) If one actuation chamber is actuated, the module bends;
b) If two chambers are simultaneously actuated with the same pressure, the module bends along intermediate directions;
c) If all chambers are simultaneously inflated with the same pressure, the module elongates.
These movements are replicated and amplified when three modules are integrated (see Testing Section).
Here, a movie on the motion performance of the single module is shown:
Variable Stiffness Mechanism
Each module is provided of a stiffening channel where granular jamming mechanism is integrated. Granular jamming is based on a membrane filled with granular material. When a vacuum pressure is applied to the membrane, the density of the granular material increases and the membrane becomes stiffer than the initial state. Coarse coffee, used as filler granular material, and latex, used as membrane, demonstrated good stiffness performance [Allen et al., Cheng et al.]. For this reason, in each channel of the manipulator, a membrane filled of coarse coffee has been inserted. Three membranes are in-series connected by the vacuum line allowing their simultaneously activation. Different values of vacuum pressure are applied to the vacuum line controlling the stiffness level of the manipulator.
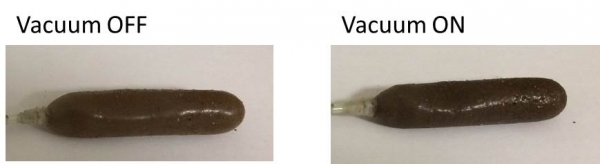
Below is an example of three membranes in-series connected is shown:
Activation Set up
Manipulator is controlled by an intuitive user interface connected to an external set up which includes:
- 9 air valves (one for each actuation chamber);
- 1 air compressor for supplying the valves;
- 2 air filters for cleaning air from compressor;
- 1 vacuum pump for activating the granular jamming by vacuum line;
- 1 board for the electronics.
Contributors
Iris De Falco
Bibliography
Cianchetti et al. (2013) STIFF-FLOP Surgical Manipulator: mechanical design and experimental characterization of the single module.
De Falco et al. (2014) A soft and controllable stiffness manipulator for minimally invasive surgery: preliminary characterization of the modular design.
De Falco et al. (2014) STIFF-FLOP surgical manipulator: design and preliminary motion evaluation.
De Falco et al. (2015) Design and fabrication of an elastomeric unit for soft modular robots in minimally invasive surgery.
Ranzani et al. (2013) A modular soft manipulator with variable stiffness.
Elsayed et al. (2014) Finite Element Analysis and Design Optimization of a Pneumatically Actuating Silicone Module for Robotic Surgery Applications.
L. Vyas et al. (2011) Flexible Robotics.
Laschi et al. (2014) Soft Robotics: new perspectives for robot bodyware and control.
Cheng et al. (2012) Design and Analysis of a Robust, Low-cost, Highly Articulated Manipulator Enabled by Jamming of Granular Media.
Allen et al. (2014) Robotic Granular Jamming: Does the Membrane Matter?