Modules Fabrication
The multi-module manipulator is composed of three modules in-series connected. This section presents the details for the fabrication of the single modules.
Fabrication of Module 3
1. Preparation of the Ecoflex 0050 Silicone
1.1. Weigh 12 g of part A and 12 g of part B in a mixing cup and mix them together with a plastic stirring rod.
1.2. Place the cup in a degasser machine at 1 bar vacuum pressure for about 10 min. When the air bubbles are completely removed, the silicone is ready to be used.
2. Fabrication of the silicon module
2.1 Assemble the mold (a), close the shells around it and pour the silicone up to the edge of the shells (b).

2.2 Place the mold in the oven at 60 °C for about 30 min.
2.3 Remove shells and cap_A (c), reverse the module and insert cap_B (d), close the shells so that their edges are aligned with the stiffening cylinder (e). Pour the silicone inside the rearranged mold up to the edge of the shells (f).

2.4 Put the mold into an oven at 60 °C for about 30 min.
2.5 Remove the external shells, cap_B, the chambers and the stiffening cylinder (g).

3. Insertion of the actuation tubes
3.1 Cut 3 silicone tubes to the same desired length (300 mm for example).
3.2 Put silicone glue around one end of each tube for 10 mm, without obstructing the tubes.
3.3 Insert the tubes inside the dedicated channels into the module (h).
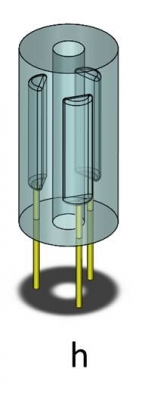
3.4 Put the module inside the oven at 50° - 60° for 10 minutes.
After these steps, you have a module (Module 3 of the manipulator) able to move when the air is supplied by the yellow tubes. This module does not yet include granular jamming and external braided sheath. If you actuate the module, you have the typical "balloon effect" as shown in the following pictures and movie (please note that the central transparent piece is just a plastic support where the module is placed).

Fabrication of Module 1 and Module 2
Other two modules have to be fabricated following steps 1 and 2. Do not insert the tubes (Step 3). These modules represent Module 1 and Module 2 of the manipulator.
Now you have three modules: only one module includes the tubes.
Contributors
Iris De Falco
Bibliography
Cianchetti et al. (2013) STIFF-FLOP Surgical Manipulator: mechanical design and experimental characterization of the single module.
De Falco et al. (2014) A soft and controllable stiffness manipulator for minimally invasive surgery: preliminary characterization of the modular design.
De Falco et al. (2014) STIFF-FLOP surgical manipulator: design and preliminary motion evaluation.
De Falco et al. (2015) Design and fabrication of an elastomeric unit for soft modular robots in minimally invasive surgery.
Ranzani et al. (2013) A modular soft manipulator with variable stiffness.
Elsayed et al. (2014) Finite Element Analysis and Design Optimization of a Pneumatically Actuating Silicone Module for Robotic Surgery Applications.
L. Vyas et al. (2011) Flexible Robotics.
Laschi et al. (2014) Soft Robotics: new perspectives for robot bodyware and control.
Cheng et al. (2012) Design and Analysis of a Robust, Low-cost, Highly Articulated Manipulator Enabled by Jamming of Granular Media.
Allen et al. (2014) Robotic Granular Jamming: Does the Membrane Matter?