Assembling segmented actuators
In previous part we described the design and fabrication of inflatable segments with a nonlinear relation between pressure and volume. In this section we outline the process of assembling the segments, resulting in new actuators with a different responses. By simply combining different segments, the response of the final actuator can be tuned, and we show some examples of the responses that can be achieved.
Two-balloon experiment
A simple experiment that is of interest, involves two balloons that illustrate the “strange” response that can be achieved when combining segments with a nonlinear relation between pressure and volume.
In the experiment, two balloons are partially inflated and connected by tubes and a valve. If the response of the balloons would be linear, the volume of the balloons would equalize and both would remain inflated. However, the response is nonlinear, and we can use this nonlinearity to create unexpected responses such as the one shown in the movie, in which one balloon completely empties into the other.
Combining segments
Using the previously made segments, we can play the same game as with the balloons, and start to program the response of the segmented actuators in different ways. While a complete numerical procedure to find actuators with specific responses is outlined in the related publication, here we focus on some specific actuators that we assembled and that show an interesting response.
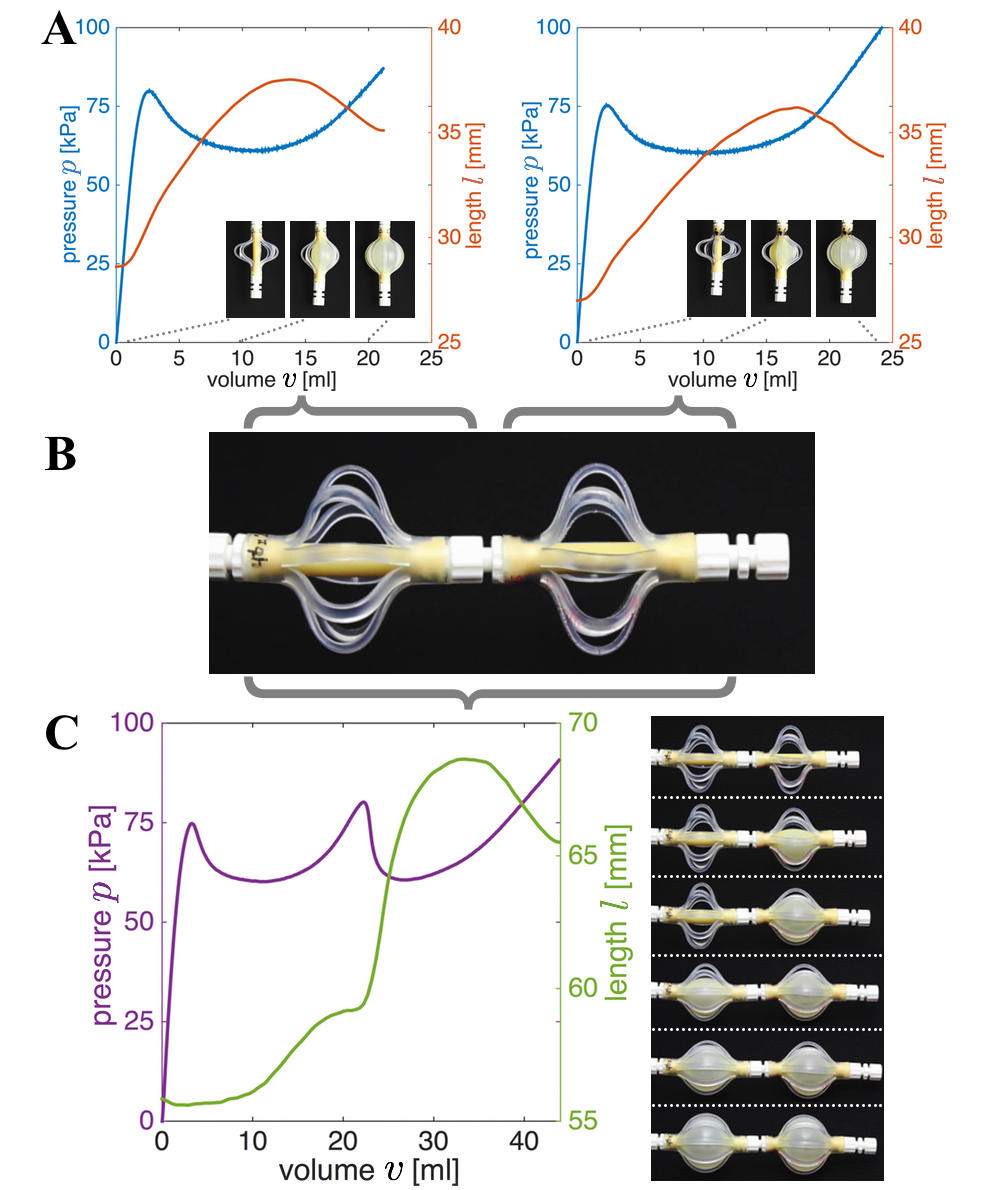
The first segmented actuator we tested consists of two segments, one segment has a tube length of 30mm and a braid length of 48mm, while the other segment has a tube length of 20mm and a braid length of 50mm. The inflation of this actuator is shown in the following movie.
There are two very interesting features about this actuator that make it different from the usual (nearly linear) soft actuators. First, upon inflation of the actuator only one of the segments inflates, similar to what we see in the two-balloon experiment. Second, about halfway through the inflation, an instability occurs and the second segment also starts to inflate. This sudden transition also triggers a sudden increase in length.
The second segmented actuator we tested also consists of two segments, one segment has a tube length of 30mm and a braid length of 44mm, while the other segment has a tube length of 26mm and a braid length of 48mm. The response of this actuator is shown below.
While the tube and braid lengths have only been slightly changed, the response is very different. Initially, again only one of the segments inflates, however, at some point along the inflation the actuator suddenly completely changes shape and all volume flows from one segment to the other. This clearly indicates that inflation sequences can be programmed into the actuator, which can be easily tuned through assembly of different segments.
To illustrate the fact that many of the transitions occur instantaneously, we also assembled an actuator using three segments with (tube length, braid length) equal to (28mm, 40mm), (30mm, 44mm), and (24mm, 50mm). Now, we inflate the actuator to a point just before a transition point, and decouple the system from the syringe pump. We connect a small pocket to the system, and slightly increase the volume in the actuator by squeezing the pocket at shown in the following movie.
This small increase in volume triggers an instability in the system, causing all the volume from the two outer segments to flow into the center segment. Really interesting behavior!
Increasing the actuation speed
In this study we used water to actuate the segments (due to its incompressibility). However, it is important to note that the actuation speed of the proposed actuators can be greatly increased by supplying air. In fact, we find that water introduces significant inertia during inflation, limiting the actuation speed. It typically takes more than 1 second for the changes in length, pressure, and internal volume induced by the sudden transition to fully take place. However, by simply using air to actuate the system and by adding a small reservoir to increase the energy stored in the system, the actuation time can be significantly reduced to 0.1 second, as shown in the following movie.
This movie highlights the potential of these segmented actuators for applications where speed is important. Although this actuation time is similar to that of existing high-speed soft actuators, only a small volume of supplied fluid is required to actuate the system because we exploit snap-through instabilities at constant volume. Therefore, relatively small compressors are sufficient to inflate these actuators, making them highly suitable for untethered applications and robots.
Bibliography
Overvelde et al. (2015) Amplifying the response of soft actuators by harnessing snap-through instabilities
Contributors
Johannes Overvelde