Design and fabrication of segments
Typically, when fabricating soft actuators the aim is to design them such that their relation between input and output is as close to linear as possible. Therefore, pneumatic actuators are designed such that they have a linear relation between pressure and volume. While this simplifies the control of these actuators, it also limits the range of responses that can be achieved. In this project we take the opposite approach, and design soft pneumatic actuators with a highly nonlinear response. This allows for a larger range of responses, and as such the actuators can be embedded with a mechanical “intelligence”.
To achieve tunable actuators, we assemble them from a number of inflatable segments. To create the preferred nonlinear response, each individual segment needs to:
(requirement 1) show an initial peak in its pressure-volume relation
(requirement 2) show a softening thereafter
(requirement 3) show a final steep increase in pressure
In addition, we would also like to be able to tune the response of the segments by making simple changes to their design (requirement 4).
Using tubes as segments
One particular system that shows this behavior is a simple rubber balloon. Inflating a rubber balloon initially requires a relatively high pressure. After this initial peak, it becomes easier to inflate a balloon. However, at some point the rubber is stretched so much that it will start to stiffen (before the balloon wil explode). We aim to make actuator segments with a similar response, and that can be easily tuned by changing some dimensions.
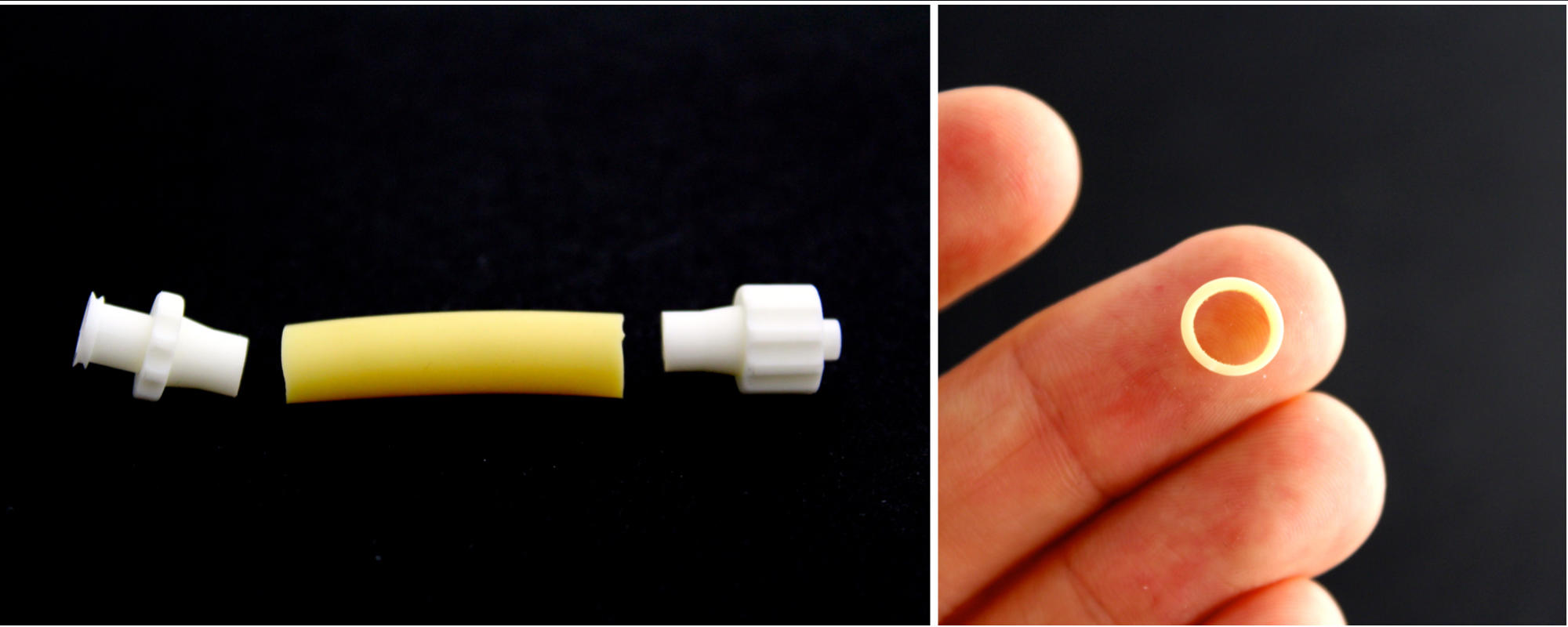
Taking inspiration from balloons, we start by fabricating individual inflatable segments from rubber tubes. To make segments that can be easily assembled into segmented actuators, we glue the tube at each end to luer-lock couplings (one plug and one socket connection).
Upon inflation of these segments, we find that the initial peak in pressure (requirement 1) and softening thereafter (requirement 2) are met, but we do not observe any stiffening within reasonable limits of applied volume. Moreover, the response of the segments doesn’t depend on the length of the tubes, which makes it more difficult to tune their nonlinear response (this is due to the fact that the tube locally bulges upon inflation). Note that we inflated the tubes with water, so that we know exactly how much volume we add to the system (water is incompressible). Air can be used as well, but the pressure-volume response of the segment will look different.
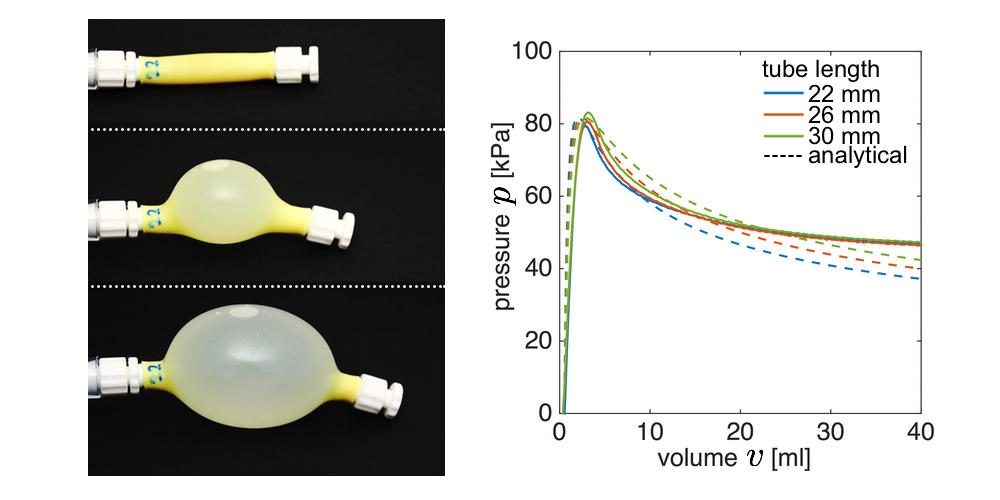
While it is also possible to tune the response of the segment by changing its radius and thickness and by using a material with a different stiffness, all these properties depend on the availability of materials, and can therefore not be changed continuously (in contrast to the length).
Adding braids to the segments
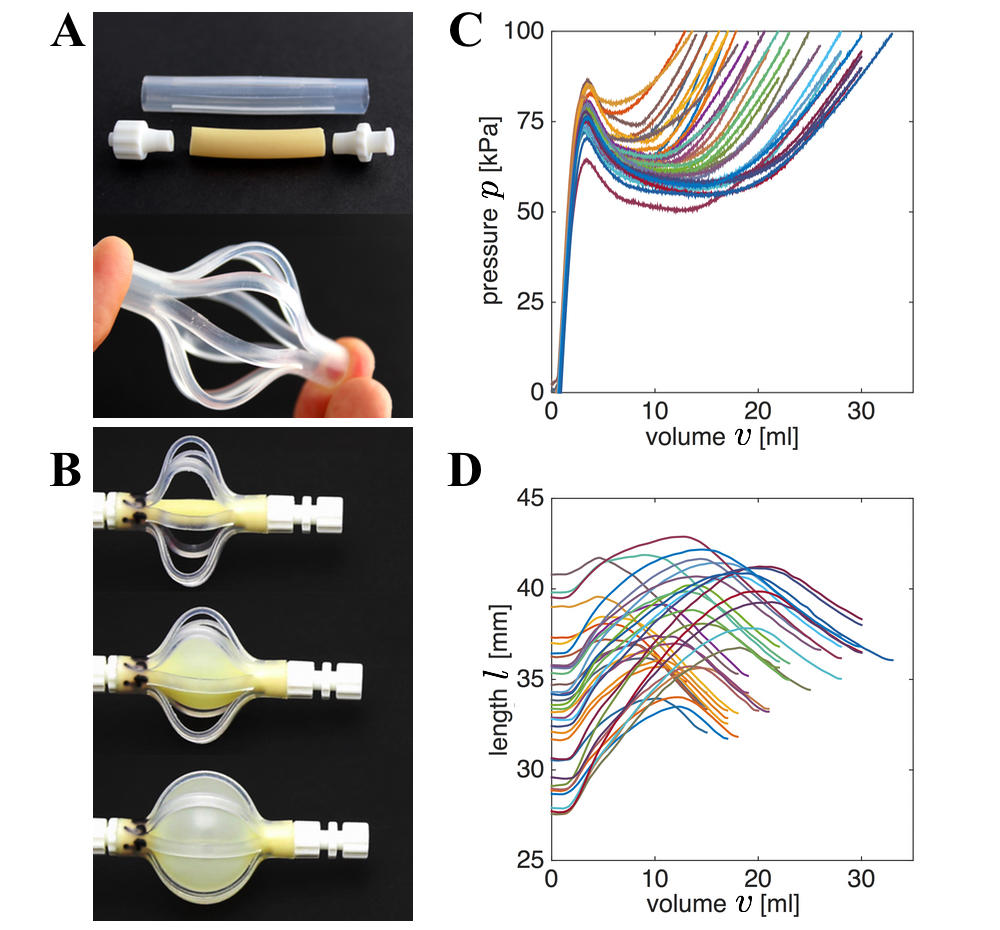
To make inflatable segments for which the response can be more easily tuned (requirement 4), and that also show a stiffening response for higher volumes (requirement 3), we add an additional component to the tubes which we refer to as braids. To fabricate these braids, we start from a stiffer tube (much stiffer than the rubber tube, but still a bit flexible), and cut slits along the length of this tube using a 3D printed tool. This process forms braids along the length of the tube, which upon compression buckle outward. When enclosing the rubber tube with these braids, at some volume the braids and tube come into contact, resulting in an increase in pressure (requirement 3). Note that changing the length of the braids and changing the length of the tube now both have an effect on the pressure-volume relation, and can therefore both be used to tune the response of the inflatable segments.
The next video shows the inflation of an individual segment.
Steps to fabricate braided segments
Previous part introduced and tested inflatable segments that satisfy all four requirement. In this part, we describe the steps required to fabricate the braided segments. More information on the materials used and where to order are given in the detailed information section.
(step 1): Cut the rubber tube to the preferred length (make sure you add additional length for the regions that will be glued the luer-lock fittings).
(step 2): Glue on one side a luer-lock with a plug coupling from which the barb has been cut using a sharp knife.
(step 3): Using the 3D printed tool (files can be found in the detailed information section), cut the polyethylene tube to fabricate the braids.
(step 4): Slide the braided tube over the rubber tube, and glue the braided tube to the rubber tube by applying glue to the rubber tube.
(step 5): Make sure the free end of the rubber tube goes through the free end of the braided tube, and glue to tube to a luer-lock with a socket coupling from which the barb has been cut. You need to buckle the braids during this process, to make enough room to glue the rubber tube to the luer-lock coupling.
(Step 6): Now finish the segment by applying glue to the end of the rubber tube, and fixing the free end of the braided tube.
Note that for the actuator to work, the rubber tube needs to be shorter than the length of the braids. The actuators we fabricated consisted of rubber tubes ranging between 20-30mm, and braids between 40-50mm.
Design alterations and improvements
While these segment show the preferred pressure-volume relation, they are not the most efficient actuators when it comes to the changes in length. The maximum values we obtained were around a 40% increase, but this depends on the length of the rubber tube and braids used to fabricate the segments. Although we don’t discuss possible alterations in details, we want to note a few possibilities to change the response besides changing the length of the tubes and braids:
(alteration 1): To make a bending actuator, you can leave a few slits on one side of the braided tube uncut. This only results in buckling of the braids at one side of the segments, causing it to bend.
(alteration 2): The slits can be cut at an angle to create a twisting segment.
(alteration 3): The braids could possibly be replaced by different structures to guide the deformation more efficiently (think for example of origami tubes).
Bibliography
Overvelde et al. (2015) Amplifying the response of soft actuators by harnessing snap-through instabilities
Contributors
Johannes Overvelde