Fabric-Reinforced Actuator

Initially, the body of the robot was made of an extending fiber-reinforced actuator. The robot was able to achieve reliable forward motion. However, when the robot extended, bubbles of rubber appeared in the gaps between wrappings. The example pictured was due to inconsistent winding; however, it highlights a weakness in the design of extending fiber-reinforced actuators. These actuators have a finite number of wrappings; as the actuator extends, the gap between wrappings increases. Eventually the internal air pressure forces sections of the bladder between the gaps in the wrappings. This problem can be mitigated by wrapping the bladder evenly and having a uniform wall thickness. However, the tolerances required are too small to be kept reliably.

The first prototype to address this problem surrounded the bladder with fabric before wrapping it. The intent was that bubbles that normally would form between wrappings would be suppressed by the fabric. This was moderately successful. The bubbles were partially suppressed by the fabric. However, the actuator was extremely difficult to make because the sleeve would unravel as the actuator was being wrapped.

In the next iteration, the fabric was stapled together so that it formed a sleeve. As this new actuator was being wrapped, it was realized that the sleeve made the wrapping obsolete and the wrapping was removed. The sleeve worked well, the bladder inflated evenly with no bubbles or obvious weak points.

The next iteration used the same fabric sleeve; however, it was sewn together rather than stapled. This made the sleeve stronger and reduced the risk of puncture. This actuator defied all expectations. Since the sleeve reinforced the bladder continuously, no bubbles formed at all. It was decided to call the new actuator a fabric-reinforced actuator.
Fabric-reinforced actuators have many advantages over fiber-reinforced actuators.
Stronger: By reinforcing the bladder with a sleeve, the robot becomes significantly more durable. With no wrappings, the bladder walls can be thinner. Due to the physical constraints, the bladder is not capable of bubbling through the sleeve.
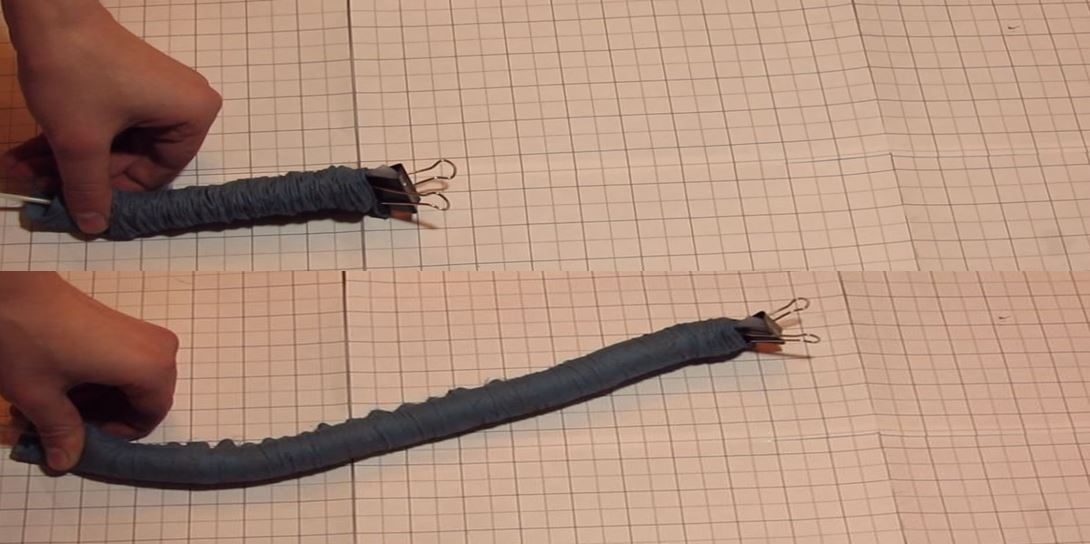
During prototyping, a 5“ long actuator with 1/16 inch thick walls was able to extend to 13 inches. At this length the actuator could still bend 180 degrees and suffer multiple impacts with the head of a hammer without taking any observable damage. A traditional fiber-reinforced actuator produced multiple bubbles and popped in similar circumstances.
Protection:

Soft robots by nature are resistant to blunt trauma. However, they are extremely vulnerable to cuts and punctures, especially when inflated. The fabric sleeve can act as a soft suit of armor that protects the robot from environmental hazards. The sleeve pictured is a made from Kevlar, and is used for arm protection. When used for an extending actuator, the sleeve was able to protect the bladder from repeated cuts with a meat knife. Even fabrics like cotton effectively protect the robot from cuts.
Variability:

Many soft robots undergo some form of mechanical programming. Examples include the addition of an inextensible layer or varying of the wrapping angle. One drawback of these methods is that they are internal. Once done, it is nearly impossible to undo. For example, if an actuator is internally programmed to curl via the addition of an inextensible layer, it cannot be reprogrammed to extend. By externally modifying the sleeve, the fabric sleeve can be used to program actuators externally. A robot designed to curl can be reprogrammed to extend by simply changing sleeves. Most sleeves can be programmed in a fraction of the time it would take to make a new actuator. Sleeves are also reusable and can be kept on hand for prototyping or new designs. This has the potential to make prototyping new robots significantly faster, easier and more economical. Additionally, fabric-reinforced actuators are not limited to single worm forms. Future robots can take any shape.