Soft Robot Fingers
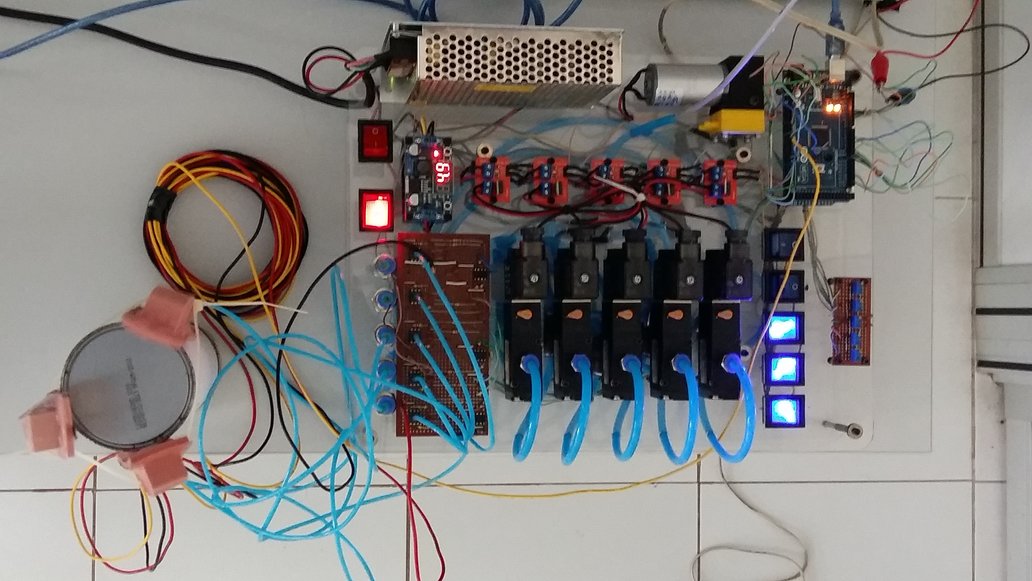
This work demonstrates elastomeric foams as a new material platform for designing soft robot gripper. These foams provide the unique capability to produce truly 3D actuating structures. The soft robot is actuated by compressed air coming from the air tank running through the miniature diaphragm pneumatic pump and electro-pneumatic solenoid valves. The electro-pneumatic solenoid valves are controlled by the MOSFET driver module via Arduino board using USB serial communication. Experimental results are showed in below sub topics and final demonstration videos.