Design
The tool has been coded in the software program OpenSCAD that can be downloaded and used for free. OpenSCAD is a CAD program that can generate 3D models from written code. These models can be output in different formats, including as a 3D printable STL file.
The code of the parametric file contains a number of variables that can be altered to yield a different actuator design:
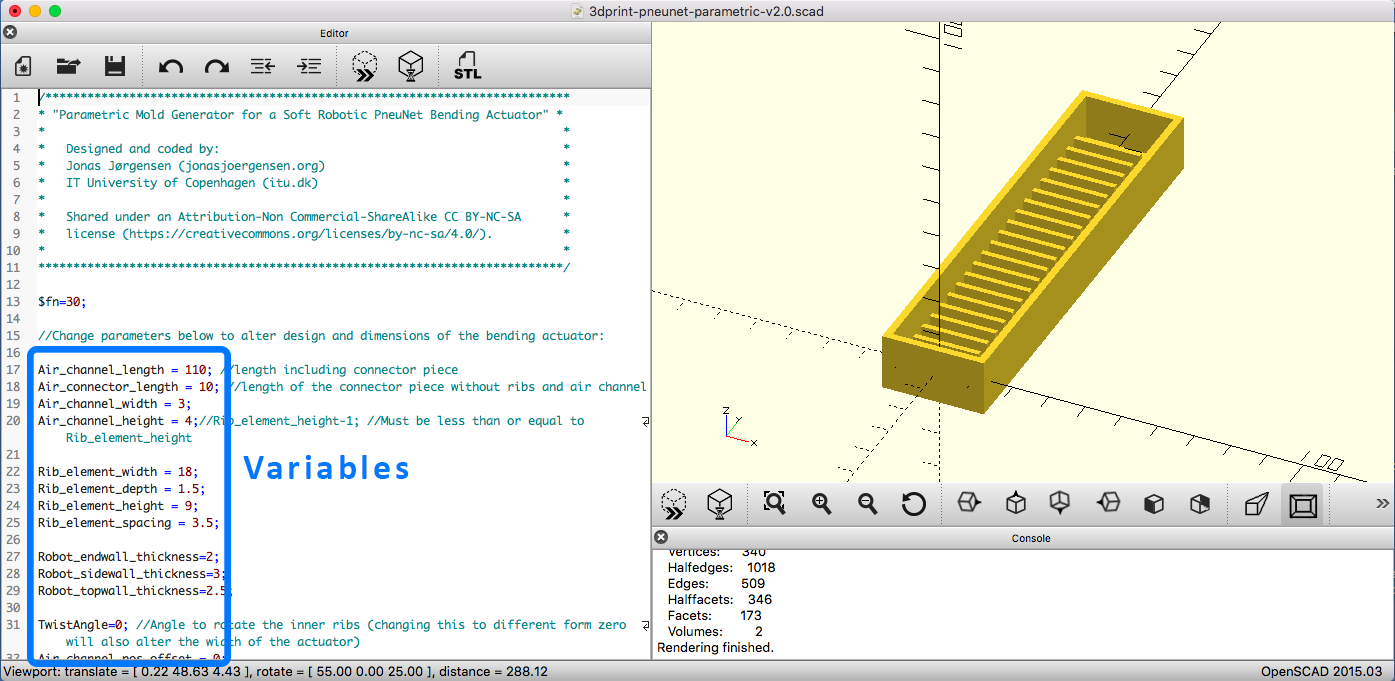
These variables include:
- The dimensions of the interior channel that connects the chambers of the pneumatic network and ("Air_channel_length", "Air_channel_width", "Air_channel_height")
- The dimensions and spacing of the ribs that create the chambers in the actuator ("Rib_element_width", "Rib_element_depth", "Rib_element_height", "Rib_element_spacing")
- The thickness of the silicone walls that surround the chambers ("Robot_endwall_thickness", "Robot_sidewall_thickness", "Robot_topwall_thickness")
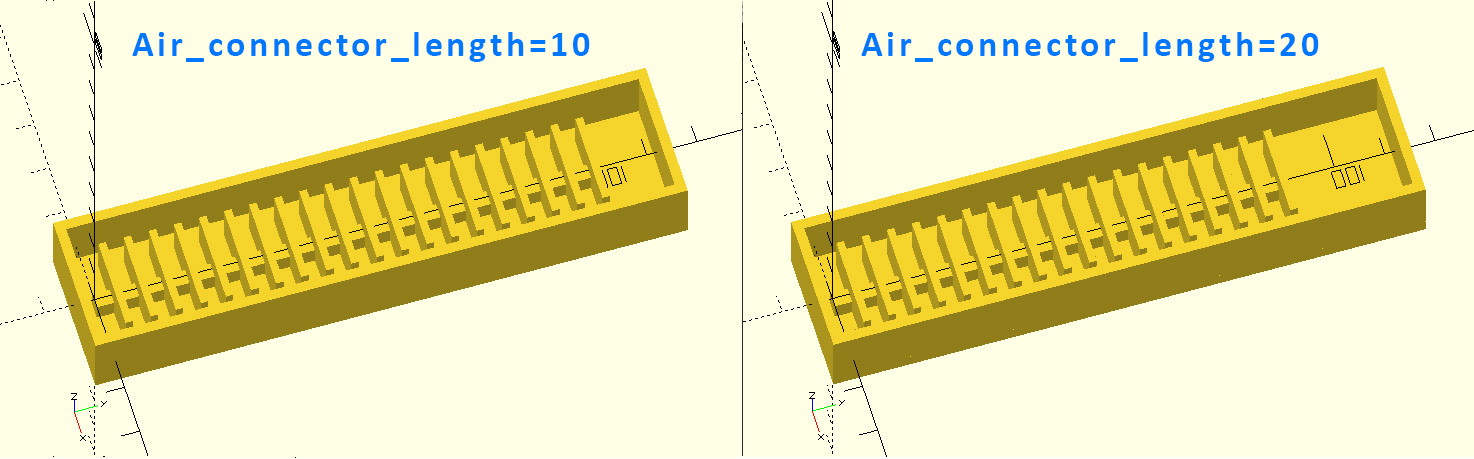
The variable "Air_connector_length" sets the length of a piece of the actuator that is solid, where tubing for actuation can be inserted and fixed:
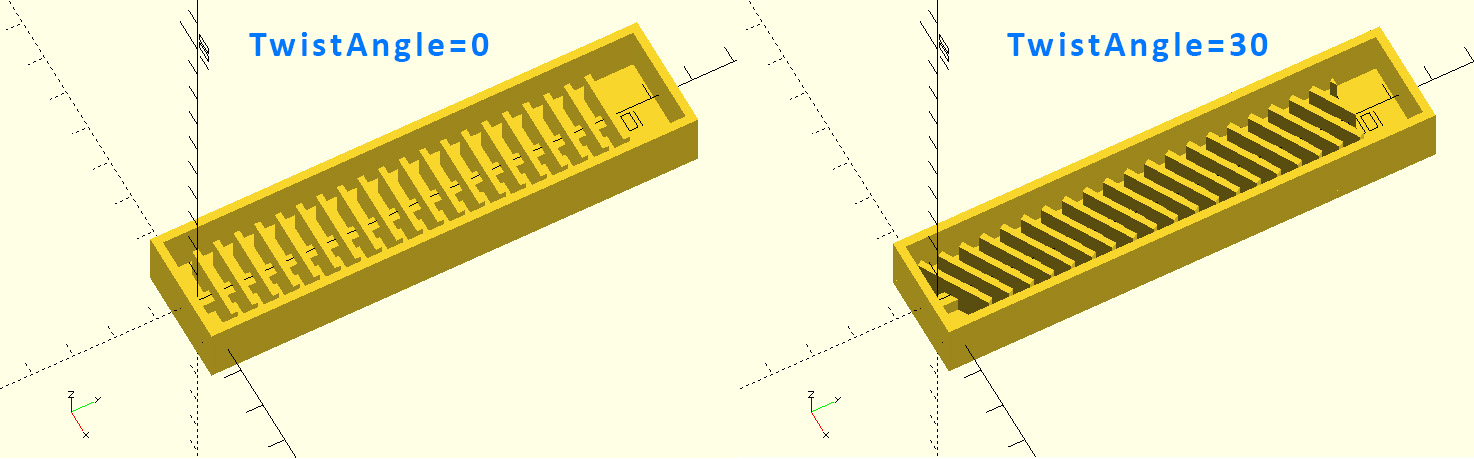
"TwistAngle" is used to rotate each rib a specific angle around its vertical axis. This will create an actuator that curls to the side:
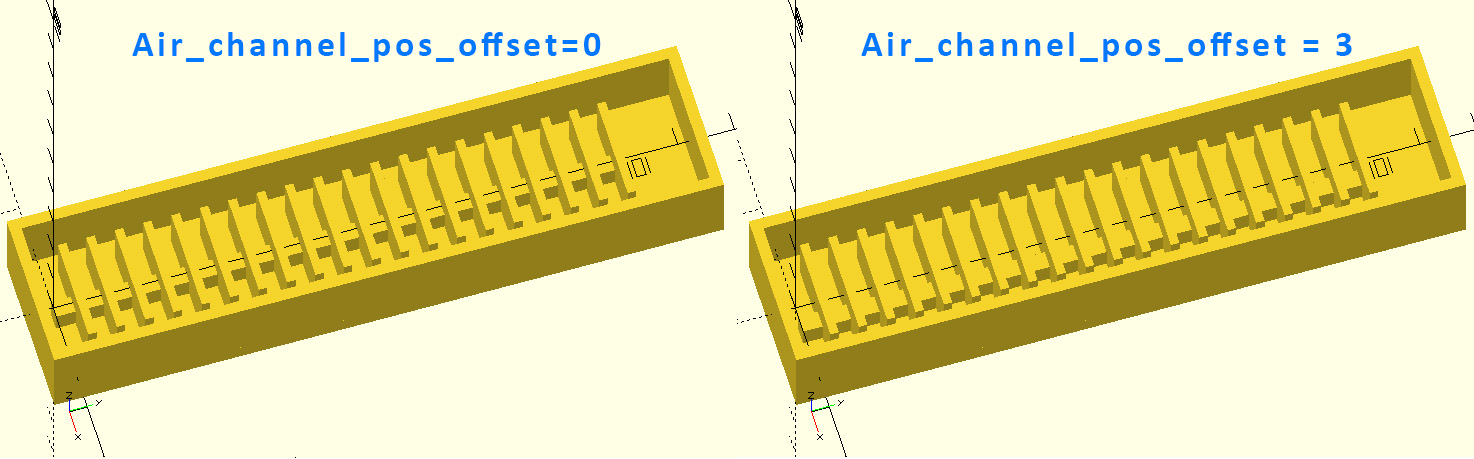
The variable "Air_channel_pos_offset" is used to offset the air channel from the middle position:
Finally, the thickness of the walls of the mold itself can also be adjusted ("Mold_bottom_thickness", "Mold_wall_thickness").