Parametric Tool to Generate 3D Printable PneuNet Bending Actuator Molds

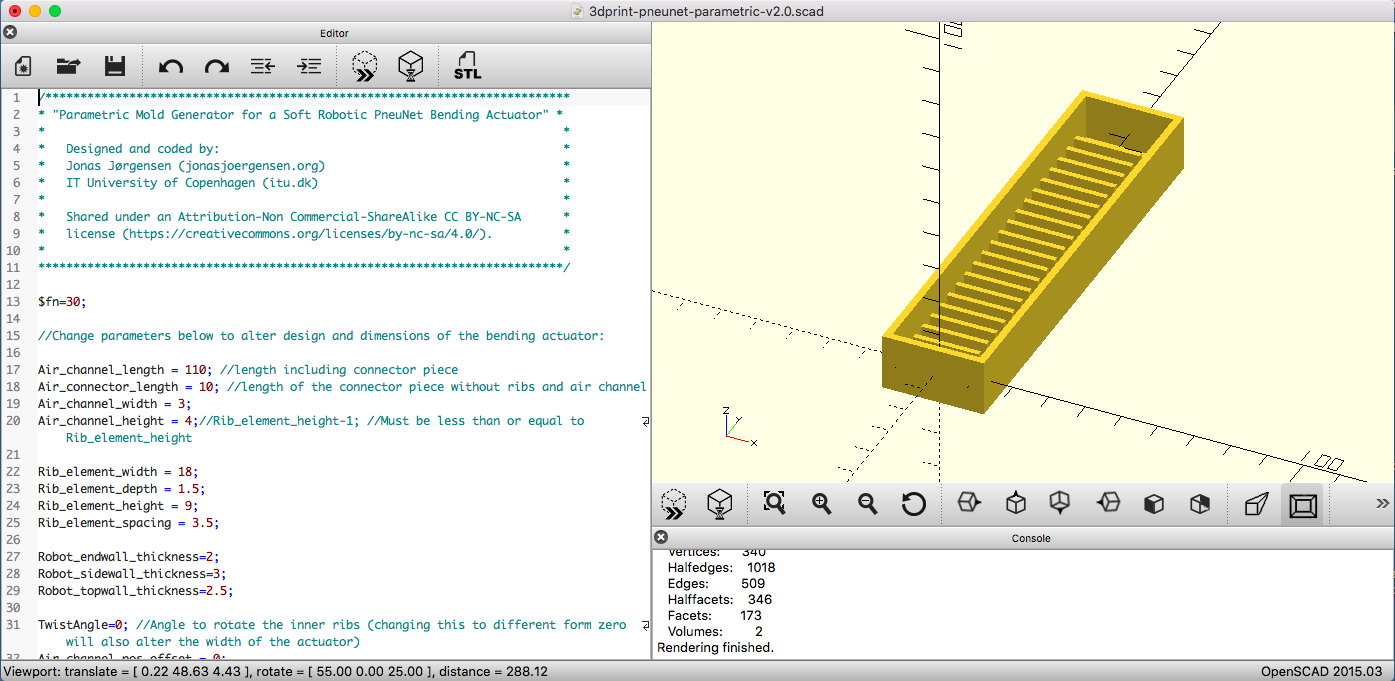
The Soft Robotics Toolkit includes pages with files and instructions for 3D printing and laser cutting a number of premade mold designs to cast PneuNet bending actuators. This documentation set contains a parametric file that can be used to generate an STL file for 3D printing a mold to cast a PneuNet bending actuator with any desired dimensions. The tool can be used to design molds for custom actuators for a specific usage. Or it can be used as a part of teaching, to have students conduct their own experiments on characterizing PneuNet actuators of different geometries.