Laser Cut Molds for PneuNet Bending Actuators

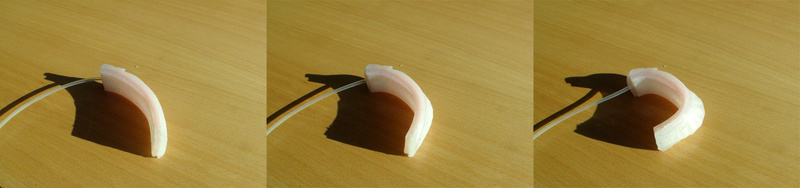
PneuNets (pneumatic networks) are a class of soft actuators originally developed by the Whitesides Research Group at Harvard. The PneuNet actuator technology has been a seminal soft robotics innovation and can be considered one of the basic building blocks for silicone based soft robotic designs.

The Soft Robotics Toolkit contains files and instructions for 3D printing molds to cast PneuNet bending actuators, but another way of fabricating molds is by means of a laser cutter. Using a laser cutter is often faster than using a 3D printer, which makes this method a feasible alternative for rapid prototyping of new designs or manufacture of a large number of molds. A laser cutter also often comes with a larger build volume than a 3D printer and can therefore create larger coherent PneuNets.
This documentation set contains files and detailed instructions to support the fabrication of four different PneuNet bending actuators. It also describes how to use these molds for casting actuators and two simple solutions for control and actuation. The mold design and fabrication procedures described are general and can be replicated to yield other designs.
The four included mold designs have been used for teaching hands-on soft robotics workshops aimed at introducing participants to basic soft robotic components, fabrication techniques, and actuation principles at the IT University of Copenhagen and Aalto University and at workshops conducted at ICRA 2018 and Pixelache Festival 2016.