RoboisE
Overview
In the Motivaion and Inspiration section, we explain about the motivation for the design of our 4-legged robot, RoboisE. The Design section contains an explanation of why we chose to use Dielectric Elastomer Actuators (DEAs) to drive the motion of our robot and how we employed DEAs to move the 4 limbs of the RoboisE, which resembles a tortoise (see Figure 1), to bring about directed motion.
In the Fabrication section, we document the process of the making and assembly of the RoboisE's body, actuators, and electrical connections. In the Testing section, we describe the actuation of the RoboisE and include videos of the RoboisE in motion.
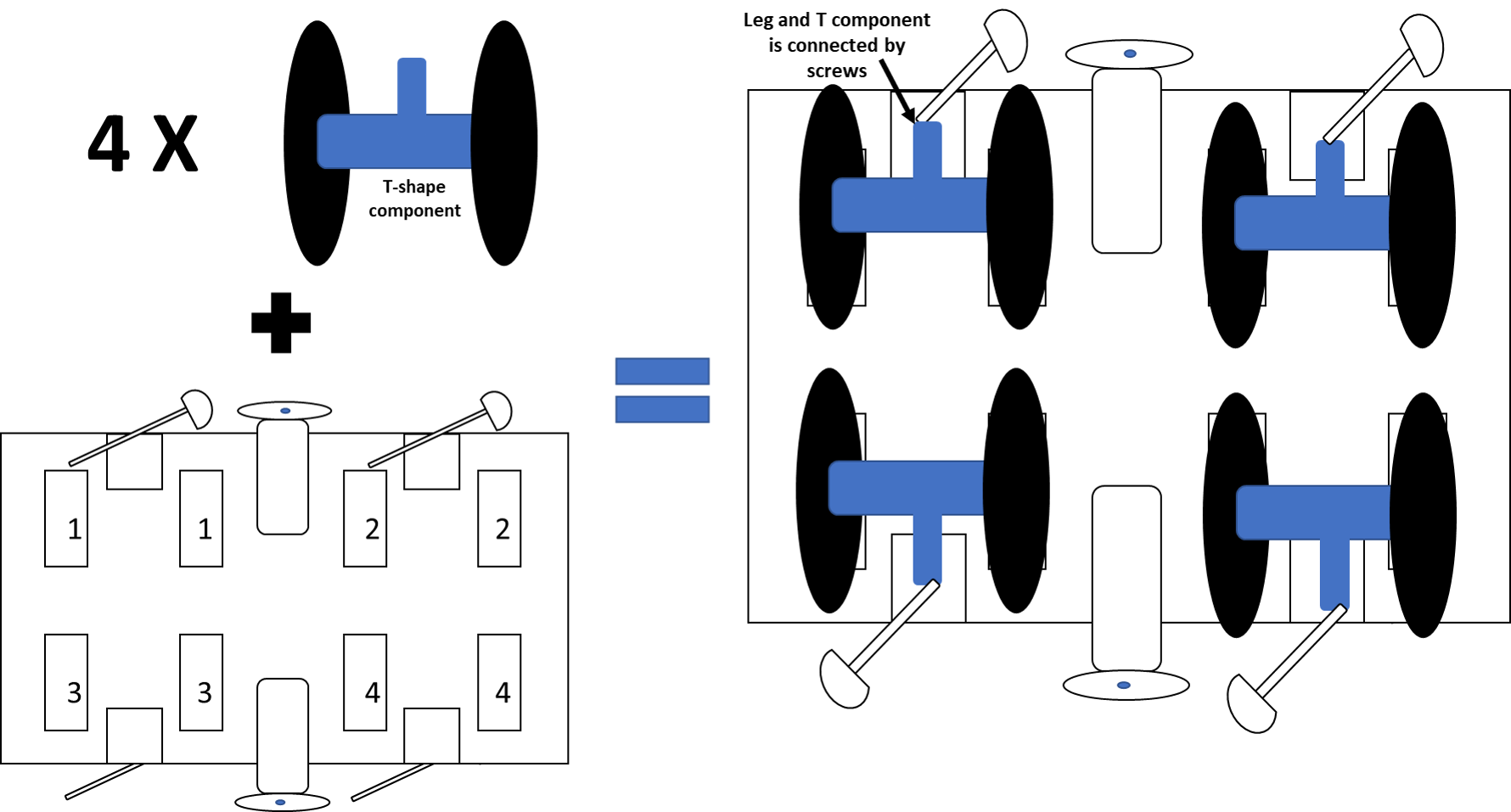
Figure 1: Schematic of Roboise design
Get to know us...
We are undergrads from Nanyang Technological University, Singapore. Our team comprises "Captain" Lan, Zaki, Febby and Marco (not from Tropoja). Just in case you are curious how we look like, this is an image of us, discussing intensely, exhibiting such amazing synergy. As you can see in the team photo, our Captain Lan is enthusiastically gesticulating with both hands, telling us that "the whole is greater than the sum of its parts".
Team photo [left to right: Marco, Zaki, Lan, Febby]