Background Design
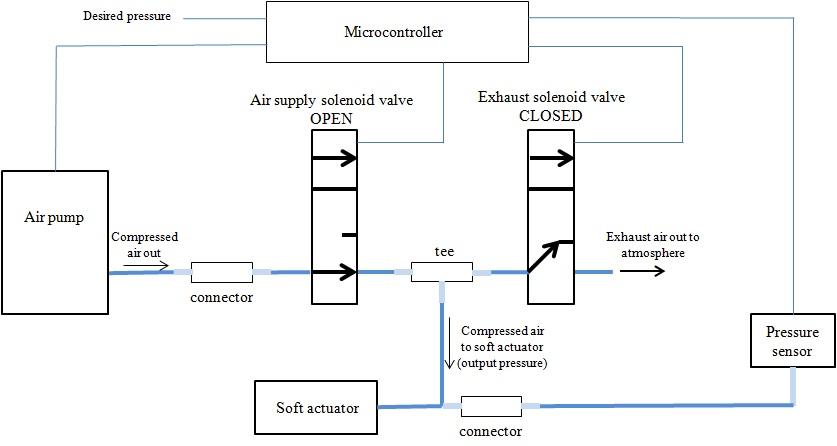
The main aim of this system is to design a low cost and affordable electronic circuit for pneumatic soft robots. The system is composed by two main parts, the embedded control board and the design of housing for the pneumatic components. Figure 1 shows the block diagram of the pneumatic control setup. The input signal is used to set the desired pressure. For control of soft actuators by a microcontroller, 1-way/2-position normally closed solenoid valves is used, (2 valves are required for one actuator) one for inflation (inlet solenoid valve) and the other for deflation (exhaust solenoid valve). Solenoid valves control the flow of air into and out of the actuators. To measure pressure, an amplified pressure sensor (0 - 5psi pressure range) with analogue interface was used and a 10-bit ADC on the microcontroller is used to read the pressure in form of voltage readings.
The figure below shows the arrangement of air pump and valves for the actuation of soft robots in order to carry out inflation and deflation cycles. As shown, it consists of an air pump to act as the pressure source; two solenoid valves (one acts as an air supply valve while the other as an exhaust valve) and a pressure sensor to measure the air pressure in the soft actuator.
Compressed air from the pump passes through the air supply solenoid valve and changes to output pressure when the air supply solenoid valve turns ON. In this way, air from the supply pump passes through the air supply solenoid valve and changes to output pressure. A PWM (Pulse-Width Modulated) output is then produced on the output pin of the MCU to switch ON/OFF the exhaust valve in order to produce an output pressure equal to the desired pressure. The exhaust valve is also used to deflate the soft actuator - this is essential for crawling motions of soft robots. The output pressure is fed back to the microcontroller via the pressure sensor. This is to check if the desired pressure has become equal to the output pressure. Pressure corrections then occur to produce an output pressure that is equal to the set pressure. Once the pressure sensor has sensed that the desired pressure is equal to the output pressure, the exhaust valve will turn OFF (close) in order to maintain a constant pressure.
Soft robots with multiple air-channels can be actuated using this system. This would be achieved by the addition of two valves for every separate air channel. This is a low pressure controller system that operates at about 0 to 5psi; since the pressure range of the pump and solenoid valves are between 0 - 6 psi. To achieve a high pressure system, this pressure regulator circuit is easy to scale up by using a high pressure pump and solenoid valves.
Contributors
Victoria Oguntosin