Variations
Pump and Solenoid valves: 6V solenoid valve having a power rating of 2.25W solenoid valve, a maximum operating pressure of 350mmHg; exhaust speed of 4s and leakage of 3mmHg/minute was used. These solenoid valves are light and compact enough to be integrated as demonstrated in this work. For higher pressure system, higher pressure valves are needed. This can be achieved by either operating two or more solenoid valves in parallel as one logical valve or simply using valves with higher pressure. 12V DC Pump and Solenoid valves can be bought instead. For this case, if you have a 12V power supply, a voltage regulator will not be required if you are using the Arduino microcontroller.
Microcontroller: Other types of microcontroller can be used such as Arduino, PIC, MSP430 microcontroller. In these cases, you have to ensure that the appropriate supply voltage is applied. For the MSP430 and LM4F120 LaunchPad, a 3.3V supply voltage is required. For the PIC16F876A microcontroller, a norminal supply voltage of 5V is required. In these cases, make sure to have the appropriate voltage regulator.
Voltage regulator: When using other microcontrollers whose input voltage is less than the voltage rating of the pump, a linear voltage regulator (e.g. LM317T) can be used rather than a switching voltage regulator. This is because little current is required to power up a microcontroller so the output voltage is regulated to 3.3V/5V while the current to the valves and pump will be supplied by the power supply. Note that to use a linear voltage regulator whose output drives the valves and pump will require the use of a heat sink because heat results when a large current is drawn. For a LM317T Voltage Regulator, it is required to use the appropriate resistor values of R1 and R2 related by the following equation to produce the desired output voltage.
Vout=1.25(1+R2/R1)
Power Supply: A 12V DC Plug-in Power supply Adapter was used to power this circuit. You can also use any DC Power Supply Unit (PSU) that can supply 9-12V and at least 1A of current. To make the system portable, I recommend using a rechargeable battery such as a 8.4V NiMH battery.
As explained above, this design leaves room for adaption to any specified application desired such as implementing the circuit design without the pressure sensor to reduce costs, a Liquid Crystal Display can be added to display the current pressure, embedding the actuation components and circuit inside the robot’s body. The system can also be extended for multi-channel soft actuators. In this case, the number of valves required will double for each separate air channel.
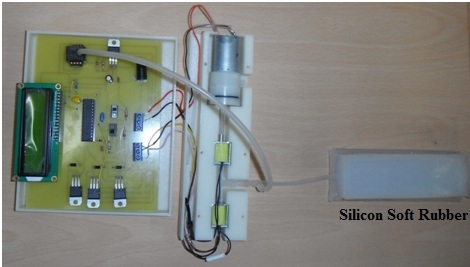
The picture below shows a PIC16F876A microcontroller being used. You can also choose to build the circuit on a Printed Circuit Board (PCB) as shown.
Contributors
Victoria Oguntosin