Design
3D Model Design
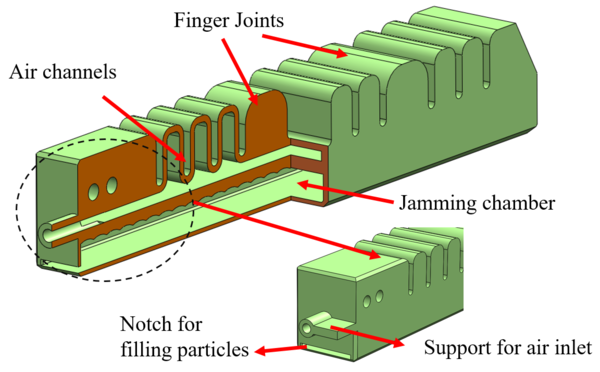
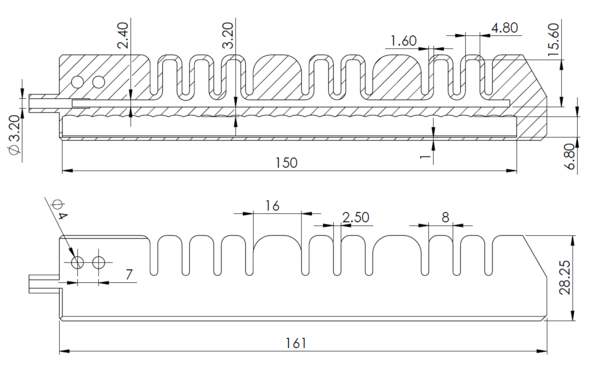
The proposed finger is pneumatic actuated. The 3D model of the proposed finger is shown in the Fig. 4. It can be seen that the finger is designed into two parts, the air channels and the jamming chamber. The air channels are designed in a way that the actuator will mainly bend around two joints. The jamming chamber will be filled with particles after fabrication. It should be noted that there is a cuboid support designed for the air inlet as there will be no support when 3d printing. And for the jamming chamber, a small notch with width about 1mm is designed for filling in the particles. This notch will be sealed with hot glue gun afterwards. Basic designing parameters are shown in the Fig. 5. There are some key parameters that makers should pay attention: thickness of the air channels are 1.6mm, and the diameter of the air inlet is 3.2mm (4mm air tube can be directly insert).