Mechanism of Proposed Finger
Related Literature Review on particle jamming
Soft grippers based on particle jamming have exhibited some promising properties in variable stiffness and shape conformity.
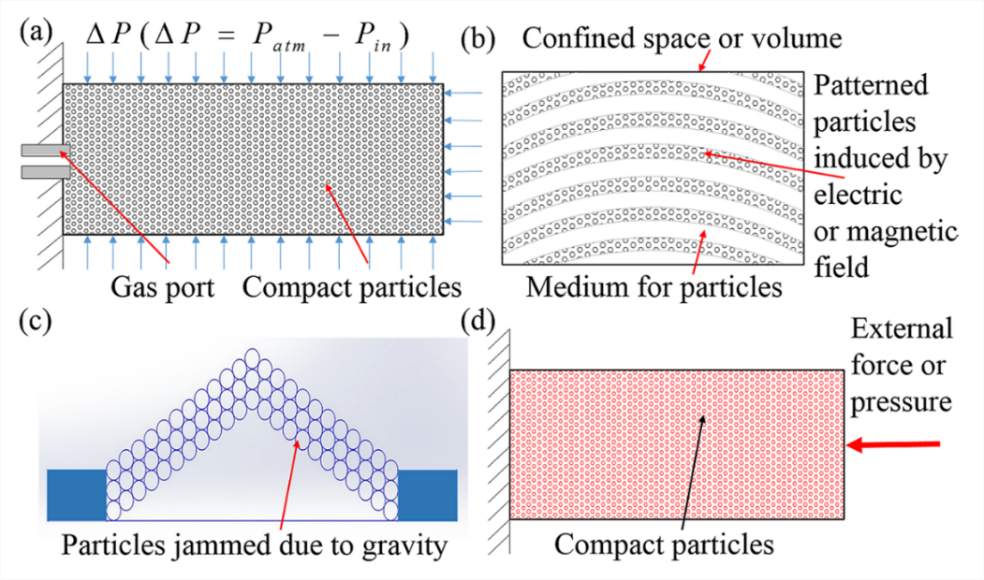
The soft gripper reported by Eric Brown, et al. utilized the mechanism of vacuum particle jamming whose fundamental working principle is shown in Fig. 1 (a). A bag of particle is forced to conform to an object shape, and the vacuum is turned on to jam the particles so that the stiffness of the gripper can be significantly increased. In the vacuum jamming condition, the pressure difference between outer atmosphere pressure and the inner air pressure results in a continuous and evenly distributed pressure jam the granular materials inside. By controlling the vacuum pressure, the gripper’s stiffness can be increased and changed instantly.
This gripper is suitable for grabbing objects with irregular shapes, but it cannot be deformed or bent actively and all the geometry changes lie on the target object it is going to grab. Another weakness for this gripper is that it cannot respond to active environment like the general elastomer grippers.
Similar works utilizing the vacuum particle jamming for robotic hand design were also reported by Jiang, et al. Apart from vacuum based particle jamming, there are alternative ways for particle jamming. In rheology based jamming, particles capable of responding to specific inductions are evenly distributed in material medium inside a confined space or volume, such as air, fluid, emulsion, foam or elastomer. By applying external electric or magnetic fields, particles will rearrange following the patterns of induced fields. The interaction force between particles induced by fields will force them to squeeze to each other, thus increasing the stiffness of the confined volume.
An illustrative diagram for this theory is shown in Fig. 2 (b). This method had some applications in robotics such as the ER (electrorheological) robots [4-6] and MR (magnetorheological) robots. All these methods require huge electric or magnetic fields, meaning that they will need many extra auxiliary devices, thus complicating the design of robots. Another possible method in increasing the stiffness of particles is to use gravity as shown in Fig. 2 (c), even though no researchers have ever utilized this method to design robots. Li, et al. observed that particles will jam by exerting an external pressure/force to a compact volume of particles as in Fig. 2 (d).
Mechanism of The Proposed Design (passive particle jamming)
For our design, the mechanism causing the passive jamming is totally different from above-mentioned vacuum jamming or rheology jamming. Instead of jamming under inner and outer pressure difference or external fields inductions, the particles will squeeze to each other and rearrange in a more compact form under an externally applied load.
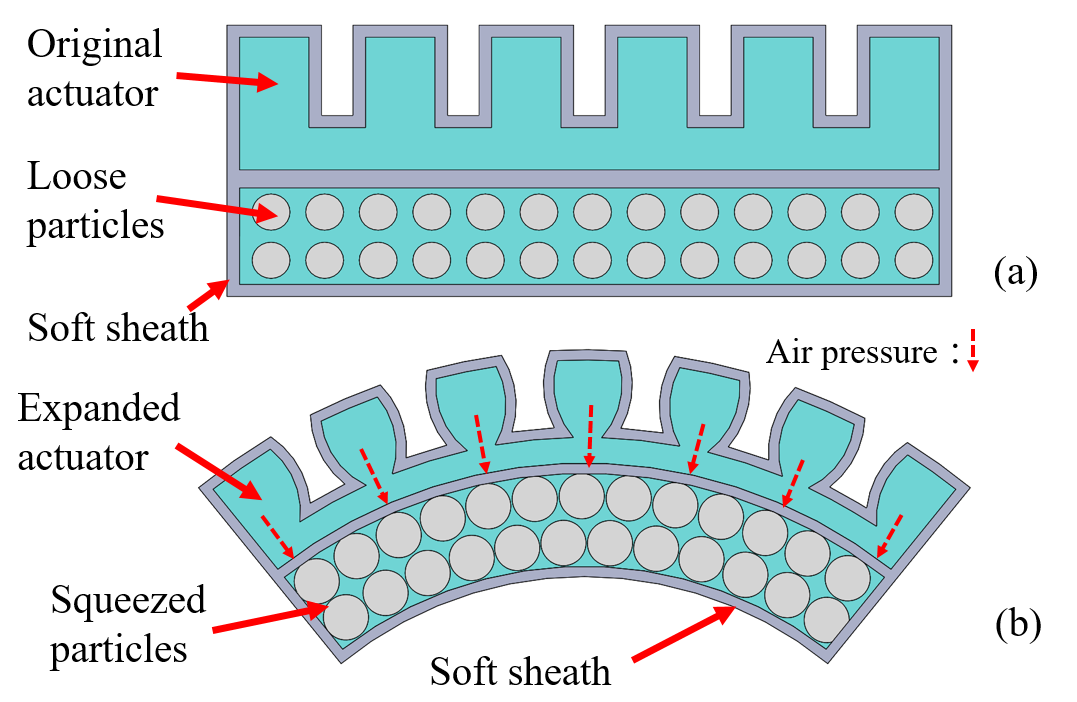
The working mechanism is illustrated in Fig. 3. When the actuator is under original state, the particles are loosely arranged in the soft sheath. As soon as the pressured gas are given into the actuator, particles in the soft sheath will be squeezed due to the expansion of the actuator. Main pressure comes from the interface of the jammed chamber and the air chamber. These squeezed particles are proven to be able to provide certain stiffness as they are jammed in certain space. This mechanism of particle jamming is promising for stiffness modulation in pneumatic soft actuator design. This is the key principle we utilized in this work.