Control Test
Test Operation
The video below shows the motion of a pair of McKibben actuators.
Testing of the Belt Tensioner
The belt tensioner avoids slack of the timing belt. The mechanism works properly.
PID Control
The team programmed a micro controller for the experiment of PID control to the powered shaft with no load. The PID control is be described below.
Rpwm | Rate of pwm (0.0~1.0) |
y(t) | Difference between target value and sensed value (unit :degree) |
kp,ki,kd | PID control parameters |

Parameters used this time are:
kp: 0.027, ki: 0.0013, kd: 0.0013
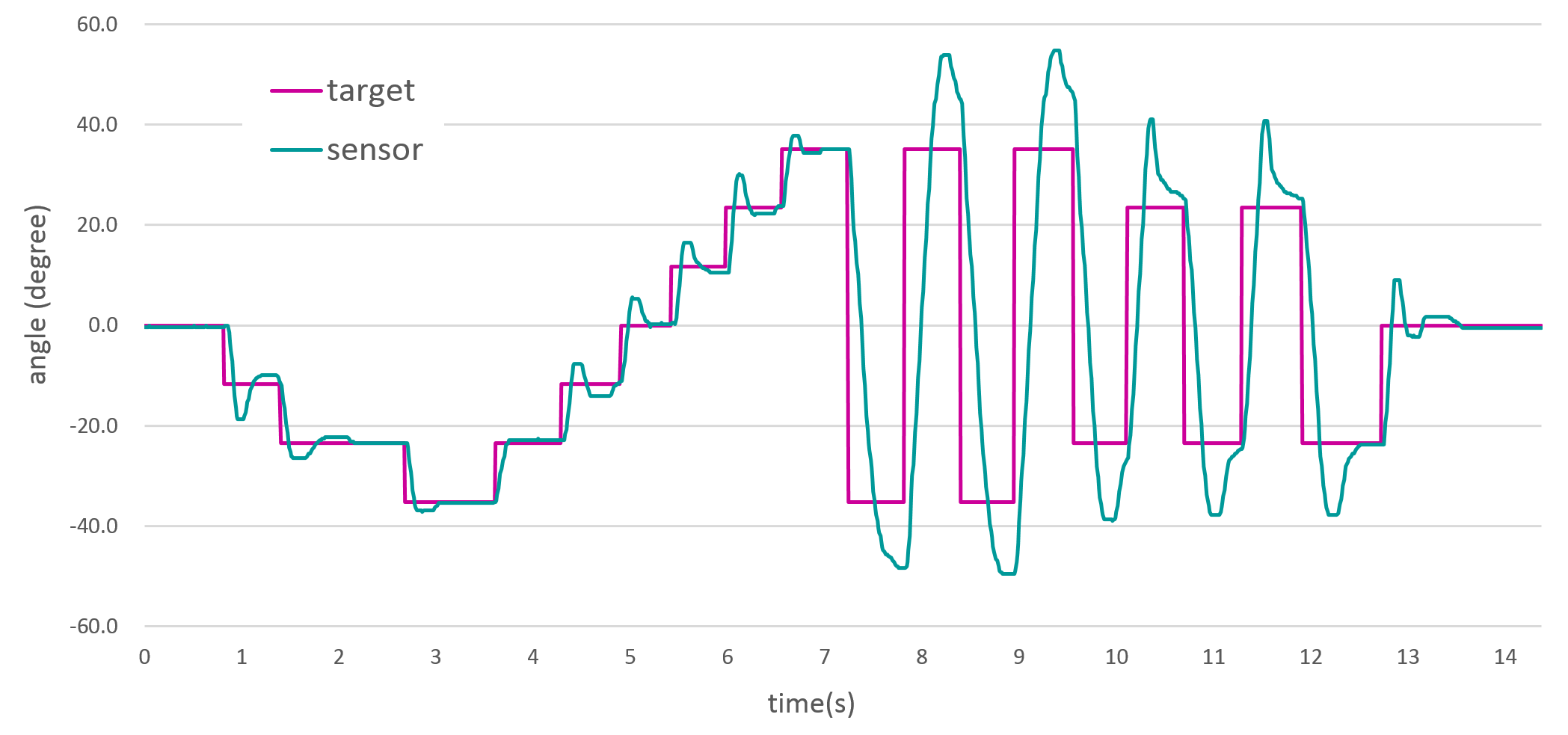
The following graph shows the result of a tracking test. Although there were some overshoots, angle sensor values tracked the reference signal with good responsiveness.