Miniature Soft Bending Actuator with Embedded Coiled Muscles
This project, inspired by PneuNets Bending Actuators from the Soft Robotics Toolkit, introduces a method of producing soft bending motion with simply and inexpensively produced components, simultaneously eliminating the constraints introduced by pneumatic elements. The goal is to produce actuation in a very small silicone part similar to that of PneuNets with voltage-driven artificial muscles, allowing power to be delivered by a battery rather than a bulky source of compressed gas.
In the Background section, we introduce the budding field of coiled-thread artificial muscles and some of the applications that have already been discovered. Additionally, we talk about PneuNets and their wide-ranging impact on the field of soft robotics, pointing out characteristics that excel as well as some that cause the technology to falter.
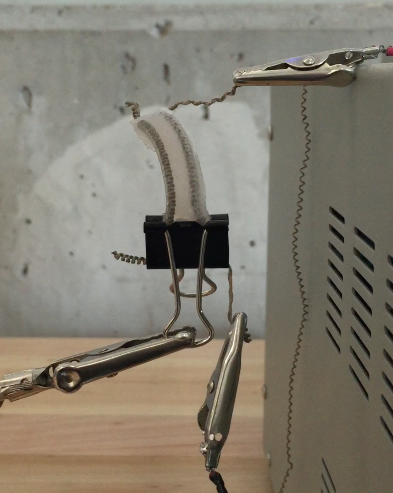
In the Design section, we describe our prototype for the silicone actuator, taking care to point out strengths as well as weaknesses, leading to envisioned next steps for improvement. In the Fabrication section, we give the materials and methods we used to produce the prototype, explaining the effects of variations in the two on performance.
We are the Zhao Research Group at Colorado State University, specializing in small-scale robotics with a focus on biomimicry. This project was worked on by David Trinko and Ali Abbas, with advising from Dr. Jianguo Zhao.
Contributors
David Trinko
Ali Abbas
Dr. Jianguo Zhao
Bibliography
F. Ilievski et al. (2011) Soft Robotics for Chemists
R. H. Baughman et al. (2014) Artificial Muscles from Fishing Line and Sewing Thread