Iterations in Mold Design
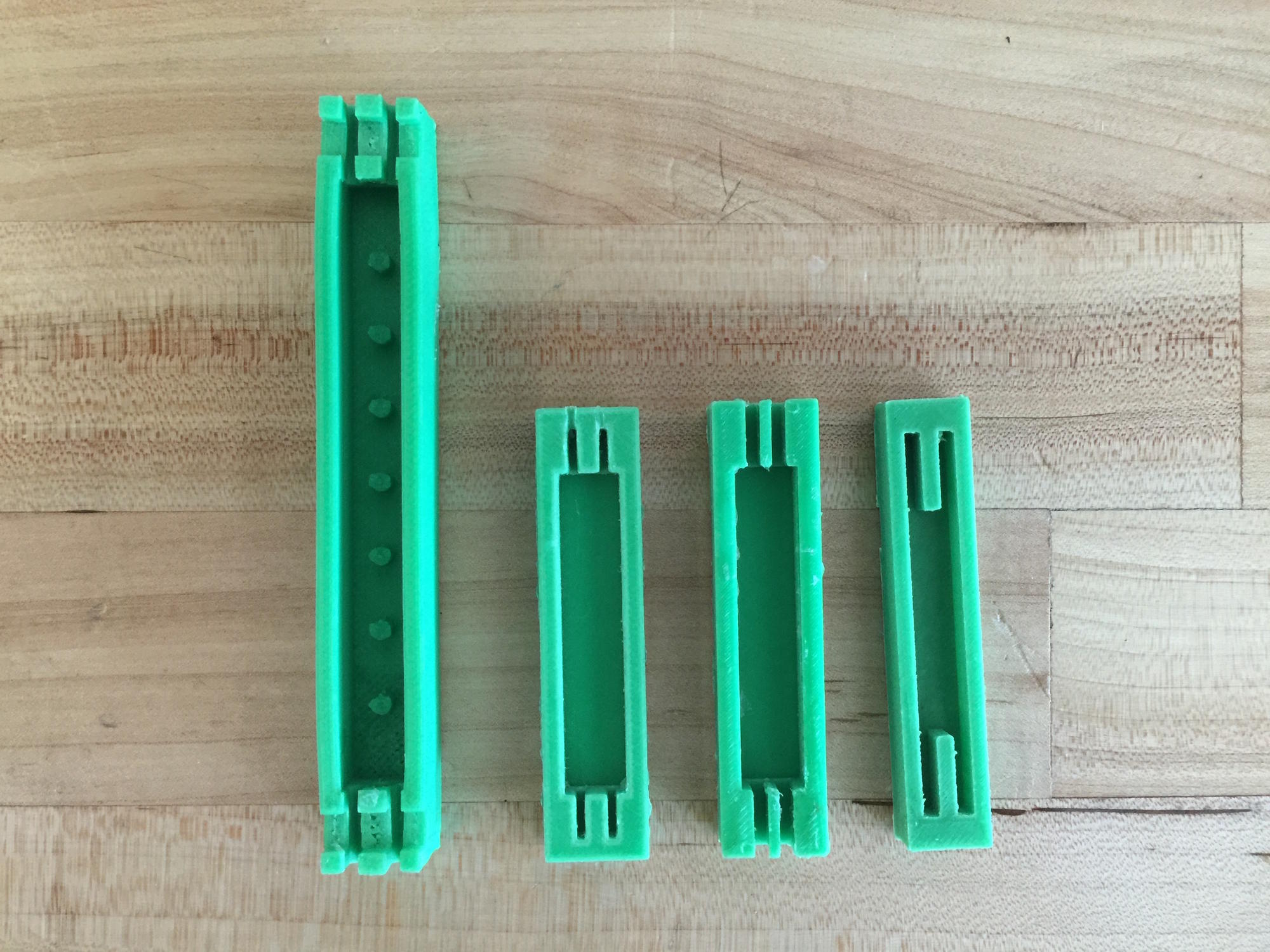
As can be seen above, all four mold designs have several properties in common: a rectangular shaped mold with a smaller rectangular cavity in one face and thin channels at the ends for constraining the embedded muscles and reducing leakage of silicone during curing.
The first mold to be designed and 3D printed produced a manipulator with dramatically greater dimensions than any successive mold: it had a length of 10 cm and a square cross section of 1 cm on each side. The mold also included short posts along its centerline to support a compression spring in the center of the manipulator, which was originally thought to be necessary to return the manipulator to a neutral position.
It was soon realized that not only would the elastic properties of the silicone be more than enough to return to a neutral position, but also that muscles on the scale we had imagined would not be sufficient to power a manipulator 10 cm long. The next two iterations heavily reduced the length and the depth of the mold (5 cm by 1 cm by 0.6 cm), and other alterations were related to changes in muscle design, discussed in the next section.
The final mold reflects a newfound understanding that the body of the manipulator should be as small as feasible (3.5 cm by 0.8 cm by 0.6 cm) and the muscles should be embedded as close to the edge of the manipulator as possible. For the first time, the channels at the end are flush with the edges of the manipulator, allowing for maximum leverage from the muscles. Lengthening the channels while closing the ends facilitates muscle placement and completely prevents leakage of silicone during curing.
Contributors
David Trinko
Ali Abbas
Dr. Jianguo Zhao
Bibliography
F. Ilievski et al. (2011) Soft Robotics for Chemists
R. H. Baughman et al. (2014) Artificial Muscles from Fishing Line and Sewing Thread